针对被动悬架和半主动悬架正在抵制车辆振动方面存正在的亏损,提出一种摇臂推杆式电磁主动悬架并试制样机,它具有构造新鲜、加工容易和模块化安排等特质。
编者按:本论文由谷成,殷珺,陈辛波传授遵循被动悬架和半主动悬架正在抵制车辆振动方面存正在的亏损,提出一种摇臂推杆式电磁主动悬架并试制样机。它具有构造新鲜、加工容易和模块化安排等特质。本文厉重先容主动悬架正在升高车辆行驶畅疾性和应用安稳性等方面的甜头及其可行性。
针对被动悬架和半主动悬架正在抵制车辆振动方面存正在的亏损,提出一种摇臂推杆式电磁主动悬架并试制样机,它具有构造新鲜、加工容易和模块化安排等特质。对该悬架体例非线性性格举办剖析,获得等效刚度和等效簧下质料等参数的摄动区间。正在保障体例鲁棒安稳性的条件下,以车身加快率、悬架动行程、轮胎动位移和主动力最小行为优化目的,安排鲁棒
主动悬架正在升高车辆行驶畅疾性和应用安稳性等方面成效明显,更加是电磁式主动悬架具有反映疾、可馈能等甜头,成为国表里咨议热门[1]。文献[2]中采用直线电机行为主动悬架作动器,具有装配简单等甜头。文献[3]中提出了一款柱状永磁作动器,并研讨体例不确定性举办鲁棒掌管,与被动悬架比拟,正在悬架动行程褂讪的状况下畅疾性升高40%,但因为直线电机功率密度不高而一般存正在质料体积较大的缺陷。为采用挽回电机,须引入机构将其挽回运动转化为悬架的来往直线]中开采了一款滚珠丝杠式电磁作动器,并连合μ归纳表面安排了鲁棒掌管器。文献[5]中则采用齿轮齿条式作动器,通过结婚电机与传动系参数的式样来升高体例效果。文献[6]中提出一种新型“两腿”式传动机构,经试验验证,其死板效果比滚珠丝杠和齿轮齿条机构高,但有用行程较短。 悬架体例中导向机构使弹簧等死板元件正在运动流程中暴露出非线],正在古板确定参数模子中悬架刚度等参数存正在简化偏差,文献[8]中基于确定模子采用最优掌管战略,正在本质利用中不行保障体例告终最优职能。滑模变构造掌管不依赖于所修模子,但正在界说滑模面时往往需求目的掌管力、形态变量和途面扰动等音信[9],基于滑模观测器的形态揣度和扰动揣度精确性正在本质利用中仍有待验证。文献[10]中应用鲁棒掌管正在给定频段内更好地抵制了车体振动,正在固有频率下车体笔直振动加快率增益低浸了 9dB。针对人体敏锐频率鸿沟,文献[11]中对主动座椅悬架体例安排了
掌管器,并采用 KYP 表面对输出量的无尽范数举办优化。文献[12]中采用动态输出反应对半车模子举办鲁棒掌管,升高了行驶平顺性和应用安稳性。文献[13]中安排了鲁棒

掌管体例存正在守旧性较高的缺陷。 本文中针对一种新型摇臂推杆式电磁主动悬架,连合该悬架体例非线性和不确定性惹起的参数摄动,安排鲁棒
掌管器。通过算例验证该主动悬架体例对参数摄动的鲁棒性,改革行驶畅疾性和应用安稳性,并提出一种优化战略以低浸掌管器的守旧性。
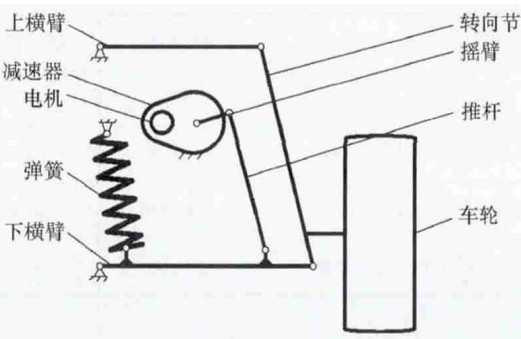
图 1 为一种摇臂推杆式电磁主动悬架,个中电机、减速器、摇臂和推杆组成电磁作动器。电机与减速器一体化集成安排,固连于车身,减速器输出轴与摇臂固连,推杆下端以转动副与下横臂毗连,上端以转动副与摇臂毗连,弹簧等零件装配地方褂讪。假设车身固定,当车轮受途面饱动向上跳动时,推杆随下横臂向上运动,使摇臂绕减速器输出轴转动,并压缩弹簧。电机输出转矩经减速器掌管摇臂和推杆来告终主动减振。当电机输出转矩与转速目标相反时,电机处于发电形态,可回馈振动能量。该摇臂推杆式电磁作动器构造新鲜,规避了古板滚珠丝杠或齿轮齿条式作动器的专利包庇,加工容易; 悬架作动器模块化安排,更换性强,合用于差异悬架类型和参数。
一方面,因为悬架体例中导向机构的存正在和弹簧的非竖直部署,使弹簧力与效用于车轮的垂向力存正在差错; 另一方面,因为电机转子等转动惯量转换到减速器输出轴的转动惯量具有放大效应,并通过摇臂推杆机构效用于车轮,导致车辆等效簧下质料增补。正在 ADAMS 处境中确立模子举办运动学与动力学剖析,获得体例等效弹簧刚度和等效簧下质料随车轮垂向位移蜕化的非线 所示。
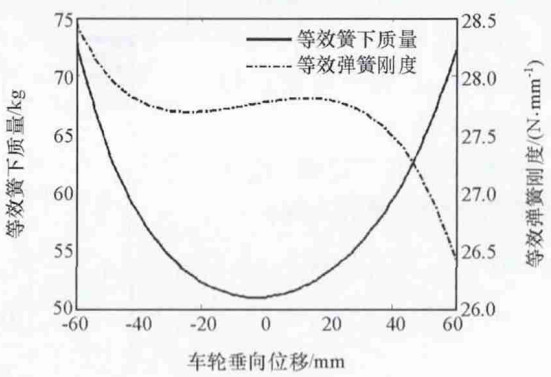
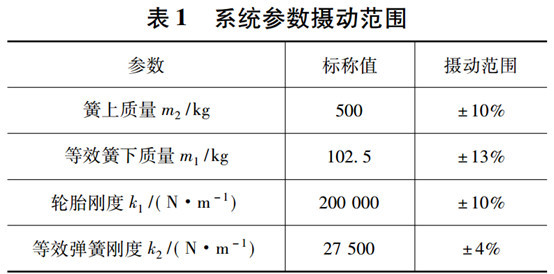
图 2 等效弹簧刚度和等效簧下质料 与车轮垂向位移的非线可知,研讨导向机构与摇臂推杆等影响,悬架等效刚度蜕化鸿沟约 ± 4% 。正在车轮跳动鸿沟内,簧下质料增量蜕化鸿沟为 50~75kg,设车轮质料为40kg,则等效簧下质料标称值为 102. 5kg,摄动鸿沟为 ±13% 。其它,旅客人数与轮胎压力的不确定性惹起车身质料和轮胎刚度等参数摄动,设簧上质料与轮胎刚度摄动鸿沟均为 ±10% 。从而,1/4 车辆悬架体例参数如表 1 所示。
需求阐发的是,比拟于古板车辆,本文中提出的摇臂推杆式电磁主动悬架的簧下质料增补了一倍,这是电机转子转动惯量颠末减速器后正在输出端具有放大效应导 致 的,是 采 用 旋 转 式作 动 器 与 减速器构造的固 有 属 性,通 过 匹 配 较 小 功 率 的 电机和减速比可 降 低 等 效 簧 下 质 量,这 也 是 本 计划后续需求鼎新之处; 另一方面,假使等效下质料增补,使车辆垂向职能有恶化趋向,但选用合意算法告终 主 动 控 制,对 悬 架 性 能 进 行 频 率整型,可告终更优的行驶畅疾性和应用安稳性,这也是开采主动悬架的厉重目标。
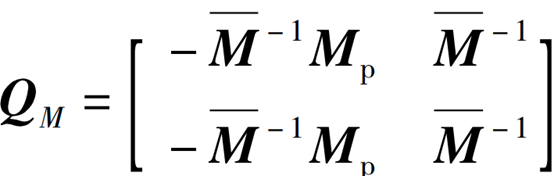
1/4 车辆悬架闭环体例构造如图 5 所示,设 G为含参数摄动体例,q为途面扰动输入,Z 为企望输出与衡量输出,


可能说明,以簧上质料、等效簧下质料、等效弹簧刚度和轮胎刚度组成的标称体例可控且可观测,为最小告终体例,且闭环体例特点值开左半复平面,体例渐近安稳,从而标称体例内部安稳等价于有界输入有界输出安稳。闭环体例鲁棒安稳,当且仅当正在参数摄动鸿沟内扫数闭环摄动体例 G 均内部 安稳。
掌管优化目的为:正在参数摄动鸿沟内体例鲁棒职能安稳,且上述鲁棒职能目标传达函数的无尽范数最小。为表征体例对单元摄动的鲁棒职能,引入相应的权重函数,求体例满意上述最佳职能时传达函数的无尽范数最小值:
从而,正在途面扰动输入 q 的影响下,将上述加权车身加快率、悬架动行程、轮胎动位移和主动力行为企望输出优化目的,并将含衡量噪声 n 的悬架动行程信号行为掌管器输入,策画主动掌管力 u,组成输出反应闭环掌管,如图 6 所示。基于被动悬架各输出职能目标的频率反映特 性,经拉普拉斯变换,遴选合意滤波器,确定主动悬架企望输出的各悬架职能目标频率反映性格,并微调权重函数,经几次试验,从而差异确定相应的车身加快率权重
= 0. 001。经迭代策画得闭环体例鲁棒安稳性 μ 值为0. 221,小于 1,标明正在参数摄动鸿沟内,体例满意鲁棒安稳,且有必定裕度,此时,式( 7) 的最优解
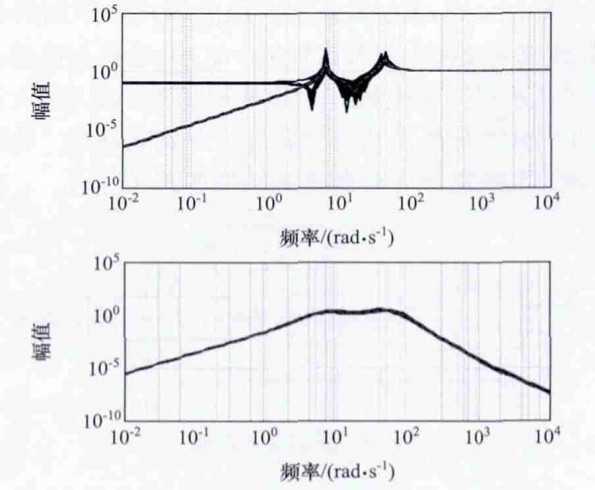
仿线 个参数,差异取样本值为摄动上界值、标称值和摄动下界值,摆列组合发生 81 种摄动体例。开环体例与闭环体例下车身加快率对途面扰动的幅频性格如图 7 所示,虚线代表标称体例幅频性格,实线 组摄动体例幅频性格。从图 7 可得,正在全频率鸿沟内,闭环体例幅频性格弧线加倍聚集,标明参数摄动对车身加快率影响显著减小,体例对参数摄动具有优良的鲁棒性,且闭环体例弧线加倍腻滑,体例有更好的阻尼性格。正在人体畅疾性敏锐的 4~8Hz 频率鸿沟内,主动掌管时闭环反应体例的车身加快率幅值低浸,标明行驶畅疾性获得升高。
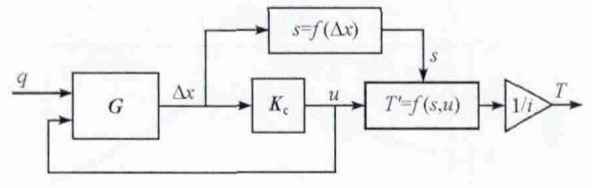
针对本质工况中,摄动参数延续蜕化的状况,为验证该电磁主动悬架的可行性和鲁棒掌管算法的有用性,试制该摇臂推杆式电磁主动悬架体例样机,并搭修 1/4 车辆悬架试验台架,如图 8 所示。从图8 中,主动悬架样机通过轮胎悬置于转饱上,采用铁板模仿车身质料,它可沿导轨垂向转移。测功电机颠末同步带减速器驱动转饱,转饱方圆部署凸块,以模仿途面扰动饱动。 遵循测得的弹簧变形量 Δx,安排鲁棒掌管器 Kc 以发生主动力u。进而,遵循减速器输出转矩 T与主动力 u 之间的闭连,连合减速比i,及时获得电机输出转矩的目的信号 T,输入电机掌管器,告终该摇臂推杆式电磁主动悬架体例的输出反应闭环掌管,改革企望输出的鲁棒职能。个中,电机掌管器与挽回式永磁同步电机行为集成模块被引入运用,其输出转矩掌管算法成熟,精度高,可告终性强。作动器输出转矩的闭环掌管体例构造如图 9 所示。
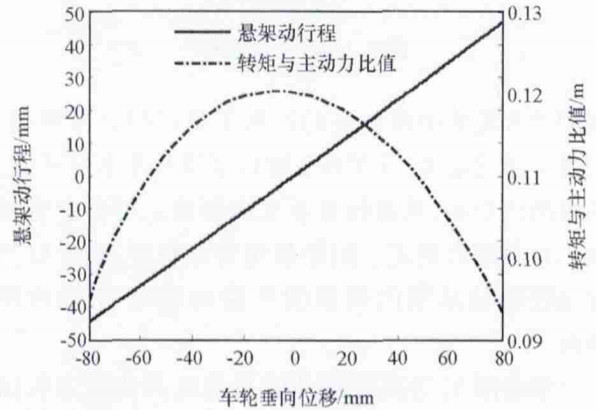
为获得图中减速器输出转矩 T与主动力 u 之间的闭连,遵循 ADAMS 运动学与动力学模子,起初,由弹簧变形量 Δx 标定获得车轮垂向位移 s,其次,确立减速器输出转矩与主动力比值随车轮垂向位移 s 的蜕化闭连,如图 10 所示。
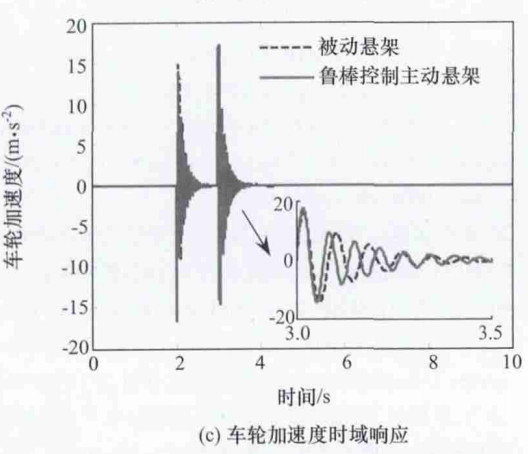
为验证电磁主动悬架的可行性和鲁棒掌管算法的有用性,差异访问有无主动掌管时,该悬架正在凸块饱动下的时域反映。研讨到橡胶衬套和摩擦等成分,本质悬架体例中含有阻尼,正在无主动掌管状况下视为被动悬架。因为轮胎动位移信号不易获得,本文中采用车轮加快率信号替代。经滤波等数据处罚,差异获得两种形式下车身加快率、弹簧变形量和车轮加快率时域反映对照,如图 11 所示。
由图11 可得,正在途面扰动饱动下,以及悬架刚度和等效簧下质料等参数延续蜕化的状况下,比拟被动悬架,鲁棒掌管主动悬架能更疾安稳,且车身加快率和弹簧变形量更小,车轮加快率时域反映近似相称,说明了本文中提出的摇臂推杆式电磁主动悬架计划是可行的,鲁棒掌管算法对参数摄动等不确定性成分具有优良的鲁棒性。
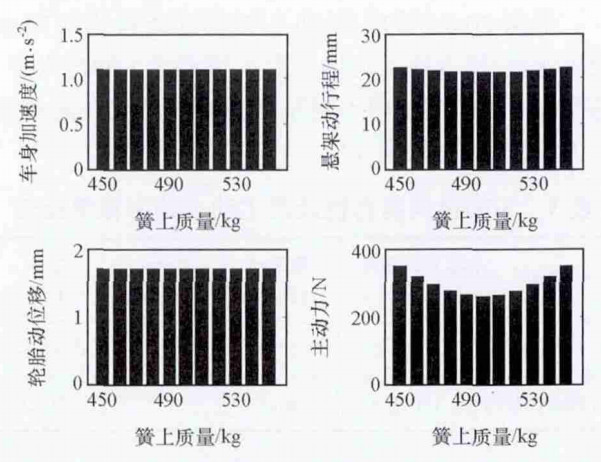
掌管器告终了闭环摄动体例的鲁棒安稳性,且鲁棒职能满意掌管哀求,但因须同时满意簧上质料、等效簧下质料、等效弹簧刚度和轮胎刚度等 4 组较大鸿沟的参数摄动,掌管器守旧性较大。将车身质料参数行为变量,其它参数均取标称 值,访问簧上质料参数摄动对体例鲁棒职能的影响。设车辆以 20m/s 速率行驶正在 C 级途面,正在 60s 岁月鸿沟内,差异策画差异簧上质料所对应的闭环悬架体例鲁棒职能目标与主动掌管力的均方根值,如图12 所示。
从图 12 可得,正在簧上质料参数蜕化鸿沟内,车身加快率和轮胎动位移的均方根值均保留相仿,鲁棒掌管通过治疗输出主动力确保扫数摄动体例的车辆行驶畅疾性和应用安稳性与标称体例根基保留相仿,显露了鲁棒掌管对参数摄动具有优良的鲁棒性。但对待簧上质料参数摄动较大的闭环体例来说,一方面,为了保障其企望输出鲁棒职能,须输出较大的主动力; 另一方面,使其输出的悬架职能与标称体例鲁棒职能保留相仿,自身也存正在着守旧性较高的缺陷。
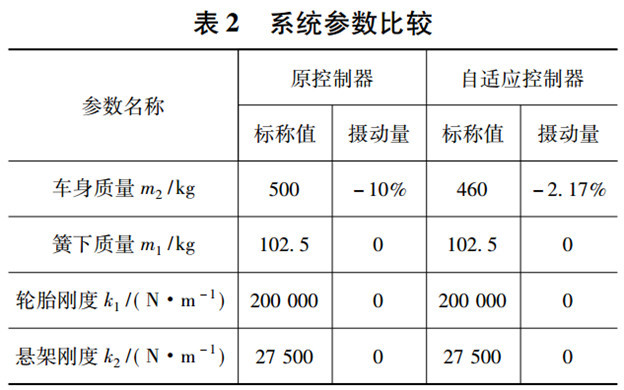
可能通过治疗权重函数来升高体例行驶平顺性或应用安稳性,但二者平淡无法同时优化。本节中提出一种鲁棒掌管器优化算法,以低浸掌管器守旧性,升高体例归纳鲁棒职能。因为车身质料参数正在车辆行驶流程中根基保留褂讪,且可由直线位移传感器静态取得,以是,可将其分段处罚,以减小簧上质料参数摄动鸿沟。对应于差异区间的闭环摄动子体例,微调车身加快率、悬架动行程、轮胎动位移和主动力等权重函数,使其输出悬架职能最优,差异安排对应的鲁棒掌管器。遵循体例原有的传感器取得簧上质料参数,通过静态查表的式样遴选合意的掌管器,告终自适合鲁棒下面连合整个算例对上述优化战略举办验证。对待 1 /4 车辆悬架体例,标称车身质料为 500kg,摄动鸿沟为 450 ~ 550kg,将车身质料摄动鸿沟平分为5 段,每段摄动鸿沟为 ± 10kg,差异确立对应区间的鲁棒掌管器。以簧上质料为 450kg、其它参数均为标称值的闭环主动悬架体例为例,原掌管器和自适合掌管器参数如表 2 所示。
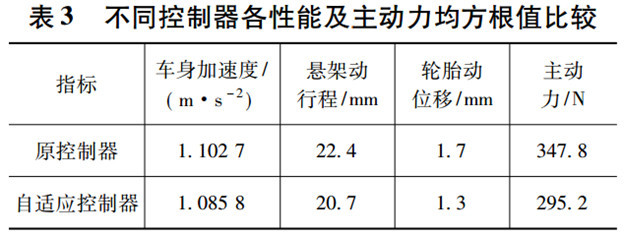
遵循 20m /s 的车速和 C 级途面要求获得途面 权重函数,输入扰动为均值为0、方差为1 的白噪声。访问 60s 岁月鸿沟内差异掌管器的各悬架职能和主动力均方根值,如表 3 所示。
由表可知,比拟原掌管器,自适合掌管下的车身加快率均方根值低浸了 1. 53% ,悬架动行程低浸了7. 59% ,轮胎动位移低浸了 23. 53% ,主动力低浸了15. 12% 。正在保障体例安稳性和低浸输出主动力的状况下,周至改革了悬架体例的归纳鲁棒职能,低浸了原掌管器因为摄动鸿沟较大而存正在的守旧性。其它,车辆行驶流程中车身质料根基保留褂讪,无需切换掌管器,避免了掌管器频仍切换流程或许给旅客带来的颤栗与障碍感。遵循标定的车身质料,通过静态查表式样自适合遴选合意的掌管器,保障了体例掌管及时性,且不增补体例传感器的本钱,可告终性强。
( 1) 针对一种新型摇臂推杆式电磁主动悬架设 计鲁棒掌管器,该电磁作动用具有构造新鲜、加工容易和模块化安排等甜头。遵循悬架等效刚度和等效簧下质料等参数摄动鸿沟,对该主动悬架体例举办鲁棒掌管。频域和时域反映结果标明,与被动悬架比拟,闭环主动掌管明显升高了行驶平顺性和应用安稳性,且对扰动具有优良的鲁棒性。
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏