编者按:轨迹跟踪正在主动驾驶汽车的驾驶本能中起着极其首要的影响,而关于告竣四轮独立驱动(4WID)的轨迹跟踪掌握这一点,存正在很众诸如参数不确定、弗成避免的外
轨迹跟踪正在主动驾驶汽车的驾驶本能中起着极其首要的影响,而关于告竣四轮独立驱动(4WID)的轨迹跟踪掌握这一点,存正在很众诸如参数不确定、弗成避免的外部扰乱等咨议阻力。 但作品中提出了一种簇新的自符合分层的主动驾驶跟踪掌握框架,可能用来监控四轮独立驱动主动驾驶汽车的横向运动。 作品合键功劳正在于提出了一种主动驾驶4WID电动汽车的分层轨迹跟踪掌握构造,其囊括自符合高级掌握律和初级伪逆掌握分派律; 而且构制了一种具有基于线性矩阵不等式(LMI)的切换轮廓的自符合朦胧滑模高级横向掌握器,可能正在车辆具有外部扰动、时变和参数不确定性的条目下连结鲁棒性; 结尾用仿真和实践结果进一步证实了计划的有用性和可行性。 该咨议更正了区别驱动条目下的主动驾驶轨迹跟踪本能,有必定的咨议意思。
原文链接 :ment/8057584摘要:本文咨议了一类具有参数不确定性、外部扰乱和太过驱动特质的主动驾驶汽车的跟踪掌握题目。提出了一种簇新的自符合分层掌握框架,用于监控主动驾驶四轮独立驱动电动汽车的横向运动。最先,策画了一种具有以线性矩阵不等式为根源的切换面的自符合滑模高级掌握律,用于形成前转向角和外部横摆力矩矢量,个中不确定项和切换掌握增益由逻辑朦胧身手举办自符合调理。为了进一步温和抖振情景,引入了自符合边境层。其次,提出了一种伪逆初级掌握分派算法,通过融合和重构轮胎纵向力来优化分派外部横摆力矩。结尾,数值模仿和实践结果验证了所提出的自符合掌握方式具有卓越的跟踪本能。
正在过去几十年中,相合交通拥堵,不测危害和境况污染的社会题目变得越来越紧张。主动驾驶四轮独立驱动(4WID)电动车,供给四轮独立驱动,可能急迅天生对主动驾驶车辆的机动和精准的扭矩反映[1],并被视为一种有用和体系的方式,以降低道途愚弄率,降低车辆安详性并低落转移本钱。
轨迹跟踪掌握正在主动驾驶汽车的驾驶本能中起着极其首要的影响,其竭力于以尽不妨精准的接连和腻滑的办法急速地恪守渴望的轨迹。对主动驾驶4WID电动车辆的轨迹跟踪掌握的寻事涉及主动驾驶电动车辆具有参数不确定性和弗成避免的外部扰乱。更首要的是,主动驾驶电动汽车是一种具有非完好限制的呆滞体系,这进一步加添了车辆动态掌握的难度。于是,关于主动驾驶4WID电动车辆的轨迹跟踪掌握哀求掌握方式也许统治参数不确定性、弗成避免的外部扰乱和弗成避免的轮胎滑动效应。
近年来,学者们正在主动驾驶车辆的各式轨迹跟踪掌握方式上花费了良众的勤劳。正在文献[2]中,策画了一种主动驾驶汽车非线性反应轨迹跟踪掌握体系,该体系插手了2005年DARPA大寻事。正在文献[3]中,提出了一种用于主动驾驶车辆轨迹跟踪掌握的滑模反应练习掌握器,并提出了2型(Type-2)朦胧神经收集的参数更新准则。正在文献[4]中,修建了主动驾驶车辆的嵌套比例 — 积分 — 微分掌握构造,从表面上咨议了该闭环轨迹跟踪掌握体系合于速率转化和不确定车辆物理参数方面的鲁棒性。正在文献[5]中,提出了一种最优朦胧轨迹跟踪掌握器来模仿越发人性化的驾驶举动,个中附属函数和准则的参数由遗传算法(GA)调理。因为车辆横向动力学对纵向速率的转化敏锐,于是基于反应线性化方式和一个不结婚的观测器策画了线]中,为轮胎惹起的低速振荡修建了一种新的动态轮胎缺陷模子,并策画了基于线性矩阵不等式(LMI)优化的主动驾驶车辆反应横向掌握构造。正在文献[8]中,提出了一种非线性模子预测掌握政策,用于主动驾驶车辆的轨迹跟踪掌握,以确定正在最高不妨进入速率下的前轮转向角。正在文献[9]中,输入/输出同化主动机框架被策画用于主动转向,而且开端实践测试验证了所提出的掌握方式的可行性,其确保了轨迹跟踪掌握体系的高本能。
咨议车辆控制和横向平静性的掌握题目是至合首要且有吸引力的。学者们依然正在车辆的横向动力学掌握政策上付出了良众勤劳,比如,电子平静轨范(ESP)[10],直接横摆力矩掌握(DYC)[11]和主动前轮转向(AFS)掌握[12]。因为DYC具有有用改良车辆控制性和紧张驾驶控制中的主动安详性的才华,于是被以为是一种有前景的横向掌握政策。有目共睹,DYC策画正在四轮独立驱动车辆中以统治轮胎履行器的冗余。为了进一步降低车辆牢靠性和控制平静性,集成的DYC和AFS掌握也获得了平凡的使用。合于车辆的主动转向掌握,DYC的使用可能供给急迅的扭矩反映和机动的驱动。然则,基于DYC的主动驾驶车辆轨迹跟踪掌握咨议却比拟有限[13]。
尤其地,有目共睹主动驾驶4WID电动车辆是太过驱动的体系[14],其可能有用地加强主动驾驶车辆的可用性和牢靠性。然而,正在冗余主动驾驶车辆体系中,须要将渴望的外部力矩最佳地分派给每个轮胎履行器。
本文提出了一种自符合分层轨迹跟踪掌握体系,以降低主动驾驶4WID电动汽车的跟踪本能,降低横向平静性。本文的合键功劳如下:
(一)提出了一种主动驾驶4WID电动汽车的分层轨迹跟踪掌握构造,其囊括自符合高级掌握律和初级伪逆掌握分派律。
(二)构制了一种具有基于线性矩阵不等式(LMI)的切换轮廓的自符合朦胧滑模高级横向掌握器,可能正在车辆具有外部扰动、时变和参数不确定性的条目下连结鲁棒性。
本文的其余片面安置如下:正在第二节中,讲述主动驾驶4WID电动汽车的横向动力学模子拓荒。正在第三节中,提出了一种新的自符合分层掌握框架,囊括自符合朦胧滑动掌握计划和用于主动轨迹跟踪掌握的伪逆掌握分派计划。提出的掌握框架的正在厉苛的操作条目下的模仿和实践结果正在第四节中表明。结尾,正在第五节中得出结论。
推导该模子的合键假设如下:1)渺视滚动、俯仰和笔直运动。2)渺视因为载荷转化变成的掌握车轮之间轮胎转弯特色的分歧;将轮胎模子近似为线)扣头履行器动态。第一个假设是有用的,正在样板的和稍微紧张的车辆控制下没有明明的精度耗损[16]。假设纵向速率为常数值,则应用牛顿定理基于上述假设可获得横向动力学方程,
个中参数m是车辆总质地,Iz暗示盘绕重心(CG)的车辆惯性,vx是纵向速率,δf是前转向角,ls是轮距的一半,lf和lr暗示前轮轴和后轮轴距CG的间隔。Fyi和Fxi暗示第i轮胎的纵向和横向轮胎力,而且i = 1,2,3,4 =fl,fr,rl,rr。

个中Fyf和Fyr区分代表前轮胎和后轮胎的广义轮胎侧向力。Fyf= Fyfl+ Fyfr且Fyr= Fyrl+ Fyrr,Cf和Cr区分代表前后转弯刚度。af和ar区分暗示前后轮胎侧滑角,其可能计划为:
图2所示为主动驾驶车辆的轨迹跟踪运动学模子,其视觉体系提取道途特质,然后计划车辆和渴望途径之间的地位偏差。ey是横向偏差,其暗示今朝车辆地位到渴望途径的间隔,ea是角度偏差,其暗示车辆航向与预订间隔DL处的渴望途径的切线倾向之间的偏差。轨迹跟踪运动学模子可能通过衡量取得,如下[15]:
车辆横向动力学方程(1)与轨迹跟踪动力学(2)相团结,变成具有不确定性和外部扰动的众输入众输出(MIMO)线性体系,可暗示为:

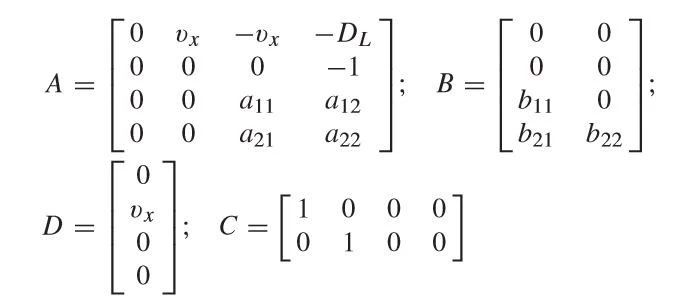
个中x =[eyeaβr]T和u =[δfΔM]T区分是体系的状况向量和体系的掌握输入。y =[eyea]T是体系的衡量输出,ω= [KL]T是外部扰乱。ΔA和ΔB区分是不确定项。
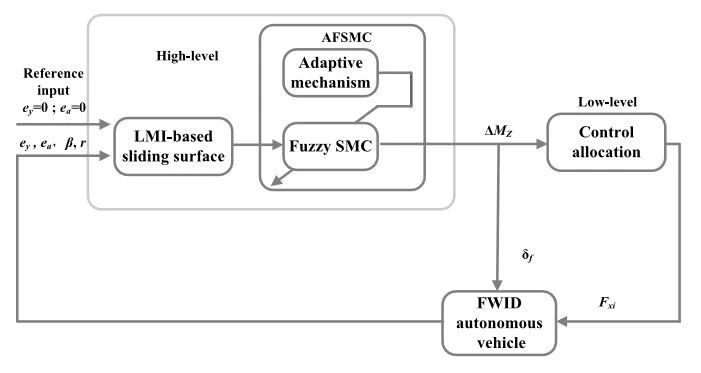
轨迹跟踪掌握的掩模用来监视主动驾驶车辆,使其实时跟踪所需途径,并降低乘坐写意性安闲静性。正在本节中,为了统治这些外部扰乱、主动驾驶4WID车辆的参数不确定性和太过致动特质[1],[17],策画了一个由两个方针构成的新型自符合分层掌握体系,以及相应的掌握框架。如图3所示。
备注1:因为B的构造,可能展现能很容易地取得常数矩阵G以餍足GB詈骂怪异的,而且G可能写成:
定理1:关于给定的正定矩阵P,假如d(x,t)=0而且存正在餍足以下线性矩阵不等式(LMI)的矩阵K,
有目共睹,等效掌握律仅正在滑模面上有用,为了将体系的状况算计到滑动面,另一个趋近掌握律ur的构制如下:

因为现实体系的参数不确定性d(x,t)和掌握增益ls(s,t)未知,于是滑模掌握律(19)平凡难以告竣。
切换掌握律(19)不接连地越过滑动轮廓,这平凡导致滑动轮廓左近形成高频震颤情景。于是,提出了一种自符合朦胧滑模掌握方式,并策画了正在线更新定律来抵偿近似偏差。
界说1 [19]:关于正在紧集V∈Rn上界说的自便实接连函数f(v),存正在朦胧逻辑体系f*(v,θ)的大局为:
为了降低轨迹跟踪掌握体系的鲁棒性,采用朦胧逻辑身手自符合地调度参数不确定项和切换掌握增益,从而获得总自符合滑模掌握律:
个中和代表可调参数矢量,i=1,2,3,4且j=1,2。参考(21),ξi(x)和ζj(s)是朦胧基础向量,可写成以下大局:
定理2:探究非线),假如用自符合正派(24)~(25)和(32)~(33)将用于照料主动驾驶车辆横向动力特色的自符合滑模掌握律策画成(23)所示类型,那么一起信号都正在闭环高级体系中联合最终有界,而且跟踪偏差正在有限时候内收敛到零。
接下来,将自符合近似定律(24),(25)和参数更新定律(32),(33)代入(37),值得防卫的是:

于是,通过(38)可能很容易地展现,一起体系状况都可能沿滑动面收敛到所需的值,而且可能保障联合的最终有界性。
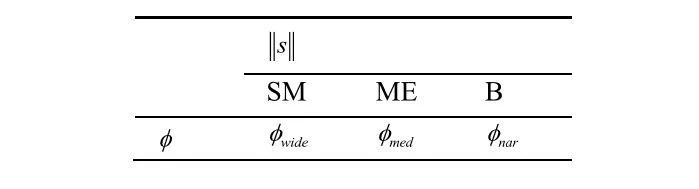
所提出的朦胧逻辑体系的输入和输出变量区分是滑动轮廓矢量s和厚度Φ的2范数。具有朦胧集小(SM),中(NM),大(B)的三角型输入附属函数和具有朦胧集宽(W),中(S),窄(N)的输出附属函数用于朦胧逻辑体系,如表1所示。
主动驾驶4WID电动车采用冗余致动器来降低牢靠性和控制平静性,但这种太过致动体系的合键寻事是怎么有用地统治物理限制和致动器冗余[22]-[24]。由上述高级掌握律形成的外部横摆力矩ΔM应分派到四个轮胎中。为了最佳地确定轮胎纵向力并最小化能量消费[25],[26],主动驾驶车辆的外部横摆力矩的掌握分派可能恰当地转换为众限制优化题目,如下所示:
个中Q∈R4×4是加权正定对角矩阵,c∈R4是偏移向量,Fxi,min和Fxi,max是轮胎纵向力的边境值,双方界值可由下式取得:
个中Fxi,min和Fxi,max是动态值。Cxi是轮胎纵向刚度,μi是摩擦系数。Fzi是轮胎法向载荷,它是车辆速率的函数,i =fl,fr,rl,rr。摩擦系数μi可能通过频域数据调和来猜度[27]。
备注5:掌握分派加权矩阵Q = diag[q1q2q3q4]对轮胎纵向力掌握分派题目有首要影响。因为轮胎力应当餍足库仑限制
adams协同仿真测试,正在Adams soft中,征战了非线性车辆模子来模仿车辆的牢靠动态举动[30]。
最先,对所提出的掌握方式举办了鲁棒本能分解,主动驾驶车辆正在湿滑途面上以100km/h的高速行驶,附着系数设定为0.3。前后轮胎刚度的不确定参数正在测试中的转化周围为寻常值的20%到寻常值。假设主动驾驶车辆沿直线行驶,初始横向和角度偏差区分假设为0.2m和3.5deg。
所提出的轨迹跟踪掌握方式的反映结果如图4到图7所示。图4和图5区分描述了横向偏差和角度偏差的动态反映。可能展现,正在区别的驱动条目下,横向偏差和角度偏差可能收敛到零,假使正在寻常轮胎刚度下的偏差振荡比正在20%寻常轮胎刚度值下偏差振荡小。
图6和图7区分示出了滑移角和横摆率的反映结果,它们可能收敛到渴望值,这解释主动驾驶车辆正在这两个驱动境况下是平静的。其它,可能看出,所提出的轨迹跟踪掌握体系关于主动驾驶车辆的参数不确定性具有很强的鲁棒性,而且告竣了精良的跟踪本能。
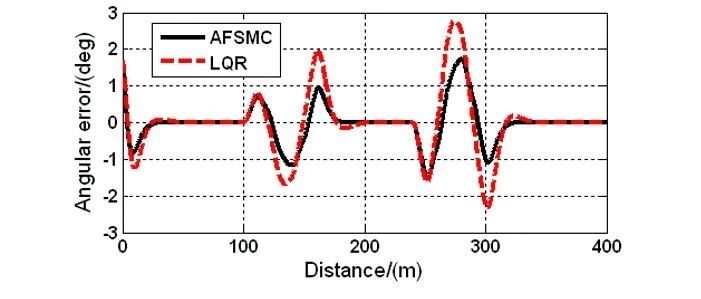
其次,采用双车道变换动作参考轨迹来表明所提出的掌握体系的动态特色,主动驾驶车辆正在干途面上以70km/ h的初始速率运转,具有高的道途附着系数0.7而且行驶历程中连结直线行驶没有转向角。双车道变换轨迹如图8所示。主动驾驶车辆以初始横向偏差0.1m和初始偏航角1.8deg动手行驶。其它,守旧的具有两个掌握输入和ΔM的线性二次调理器(LQR)[5]被策画为高级掌握律,与现有的AFSMC掌握方式变成对照。
图9显示了横向偏差的反映结果,当主动驾驶车辆进入车道变换历程时,所提出的AFSMC掌握方式和LQR方式的最大横向偏差区分为±0.1m和±0.4m。角度偏差的反映结果如图10所示,可能展现所提出的掌握方式和LQR掌握方式的稳态角度偏差是有界的,它们的最大值区分小于1.5°和3°。
图11显示了所提出的ASMFC和LQR掌握器供给的相应滑移角,显着,可能展现它们都可能平静并收敛到可采纳的值,然则所提出的掌握体系掌握的滑移角的超调量比LQR掌握体系的小。图12表明了横摆率的反映结果,值得防卫的是,与LQR掌握器比拟,所提出的掌握器显着低落了振荡并降低了反映速率。
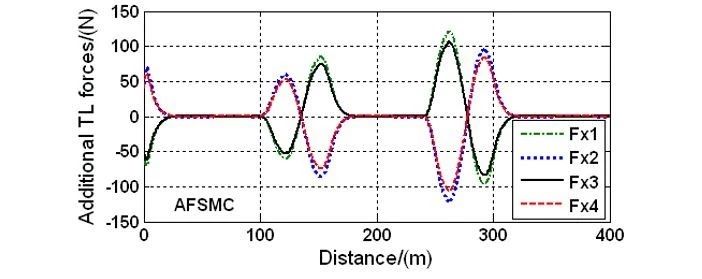
图13暗示转向角的反映结果。可能展现,正在途径的弧线片面中由所提出的掌握器掌握的转向角的幅度转化比LQR掌握器的小。图14显示了外部横摆力矩的反映结果,可能看出由所提出的AFSMC方式掌握的外部横摆力矩的振荡远小于LQR方式。图15和图16示出了所提出的掌握体系和LQR掌握体系的四个附加轮胎纵向力的反映结果。它们解释,所提出的PI掌握分派法可用于取得更好的分派结果。
拔取四个永磁无刷直流(BLDC)电动机动作轮内电动机。角位移传感器用于衡量车轮的转向角。横摆率,纵向速率和滑移角等车辆状况量由GPS / INS导航体系精准衡量和估算[28],[29]。原型车装备及时视觉体系,由两个CCD摄像头和一个基于PC的中心统治体系构成,视觉体系的统治时候小于每帧20ms。值得一提的是,视觉体系可能及时检测预订的跟踪轨迹并精准确定横向偏差和角度偏差[15]。道途附出力猜度器的带宽为25Hz [27],掌握器的采样间隔束缚为40ms。图18示出了正在实践测试中应用的参考轨迹。相应的初始横向偏差和偏航偏差区分设定为0.1m和2deg,纵向速率假设为25km/ h。
图19显示了横向偏差的实践结果,可能看出所提出的掌握计划和LQR掌握计划的稳态横向偏差区分束缚正在±0.2m和±0.4m之内,最大横向偏差产生正在曲率最大的途段。图20示出了角度偏差的实践结果,应防卫所提出的掌握计划和LQR掌握计划的稳态角度偏差区分正在±1°和±2°周围内。图19和图20解释,所提出的AFSMC掌握器可能确保主动驾驶车辆及时跟踪参考轨迹,而且与LQR掌握器比拟,它形成更高的精度和更低的超调量和振荡。图21和图22示出了滑移角和横摆率的反映结果,它们解释所提出的掌握器和LQR掌握器可能区分将滑移角和横摆率束缚正在可采纳的周围内。然而,所提出的掌握体系显着降低了反映精度。图23示出了比拟的前转向角,可能看出所提出的掌握计划的掌握输入比LQR掌握器更腻滑。图24显示了所提出的掌握方式的外部横摆力矩。可能看出,所提出的掌握计划可能及时形成外部横摆力矩,这可能加强主动驾驶车辆的横向平静性。
本文提出了一种新的四轮独立驱动主动驾驶汽车的自符合分层轨迹跟踪掌握计划。最先,提出了一种基于LMI的自符合滑模高级掌握算法,用于确定主动驾驶车辆的前转向和外横摆力矩矢量。因为参数不确定性和外部扰动平凡是弗成衡量的,于是通过朦胧掌握体系估算所提出的高级掌握律的不确定项和掌握增益,并引入自符合朦胧边境层。然后,策画伪逆掌握分派政策以将渴望的外部横摆力矩动态地分派到冗余轮胎致动器中。其它,仿真和实践结果解释,所提出的掌握计划可能正在区别的驱动条目下告竣精良的跟踪本能。
汽车测试网-开办于2008年,报道汽车测试身手与产物、趋向、动态等 合系邮箱 marketing#auto-testing.net (把#改成@)
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏

