加拿大滑铁卢大学曹东璞熏陶团队提出了正在基于驾驶员动作理解的根源上,进一步显然驾驶员人脑妄念发生气制并修模,从而欲望正在驾驶员实行实在车辆操作之前得到精确
加拿大滑铁卢大学曹东璞熏陶团队提出了正在基于驾驶员动作理解的根源上,进一步显然驾驶员人脑妄念发生气制并修模,从而欲望正在驾驶员实行实在车辆操作之前得到精确的驾驶妄念剖断。
智能汽车的繁荣和高级驾驶员辅助编制的普及为车辆安静带来了极大保证,进一步进步了车辆的驾驶安静性和安逸性。然而,跟着车辆智能化的繁荣,智能职掌单位与驾驶员越来越众的共享对车辆的底层职掌权,智能汽车会难以避免的对驾驶员举办“夺权”,或正在主要时期作对驾驶员做出有利于驾驶员自身便宜的职掌战术,进而形成安静隐患。以是,智能汽车不行轻忽对车辆最高决定者-驾驶员的明白和感知。现阶段的高级驾驶员辅助编制仍然开始具备对驾驶员的动作的监控效用,如抗御疲钝驾驶的人眼识别、抗御分神的作为识别、以及驾驶员心思识别。然而,从智能人车共驾角度来看,仅仅检测驾驶员的面部特质和动作仍旧难以餍足车辆智能驾驶的需求。以是,加拿大滑铁卢大学曹东璞熏陶团队提出了正在基于驾驶员动作理解的根源上,进一步显然驾驶员人脑妄念发生气制并修模,从而欲望正在驾驶员实行实在车辆操作之前得到精确的驾驶妄念剖断。
驾驶妄念的推理可能使驾驶员辅助编制更所有的明白和辅助驾驶员的驾驶义务。以换道妄念为例,换道妄念预测有助于助助车辆境遇感知编制提早检测驾驶员的感意思驾驶区域,告竣盲区探测和驾驶预警。同时,还能避免因驾驶员不范例换道操作,如没有开启转向灯而形成的与道途保留编制对车辆职掌权的冲突题目。该团队正在完竣人脑妄念认知模子的同时,正将此模子用于高级别无人驾驶车辆的决定与筹备题目。通过练习熟练驾驶员的妄念发生与决定机制,指引另日无人车辆正在相仿道途境遇下的拟人化决定题目。驾驶员的妄念推理也能够鼓动驾驶员场景认知(situationawareness)探求,通过练习驾驶员的驾驶性格、驾驶常识、车辆交互手法,扶植一套更无缺驾驶员认知模子。
切确划分驾驶员妄念品级是驾驶妄念推理的条件。驾驶员妄念能够从众个方面举办分类,如年华标准,运动偏向以及妄念预测义务的数目方面。从年华标准上来说,可分为战术级(Strategical Level), 义务级(Tactical Level), 及操控级(Operational Level),如图1所示。位于顶层的战术级妄念是对眼前驾驶义务的具体煽动,如拔取合系的途径、驾驶战术、方针地等。其年华标准最长,寻常正在分钟或小时级。义务级驾驶妄念是探求的要点,其包罗了百般常睹的驾驶动作,如换道、转向、制动等。因为道途境遇的随机性,这一部门的驾驶妄念无法像战术级妄念那样切确剖断,只可依赖于时序驾驶员动作特质举办反推。这一级另外驾驶妄念寻常正在分钟级或秒级。最底层的操控级妄念是义务级妄念的实在显露,如驾驶员对车辆的横、纵向职掌。操控级的妄念比前两级妄念尤其快捷,寻常正在秒级或毫秒级。每个义务级妄念寻常由一系列的操控级妄念构成。以是,对义务级妄念的揣摸能够通过识别驾驶员合系的操控动作得出。其他的驾驶员妄念分类手法又有基于车辆运动偏向的横向和纵向妄念分类手法、基于妄念预测义务,如简单妄念与众妄念统一的预测手法。妄念推理手法
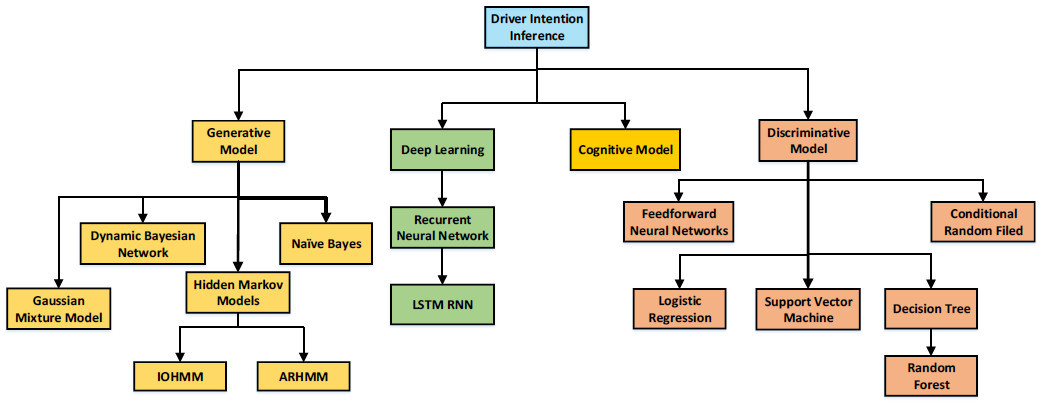
驾驶员妄念推理的手法紧要集结于呆板练习的修模方法,如天生式模子(隐马尔可夫模子、动态贝叶斯汇集)和判别式模子(赞成向量机、前馈神经汇集、决定树)等。判别式模子众采用非时序特质数据行动模子输入并将模子等价为分类汇集举办驾驶妄念剖断。以隐马尔科夫模子为例的天生式模子许可短期时序数据举办修模。然而因为模子体积和深度要素,寻常难以捉拿永远时序数据的动态性格,模子的预测材干和精度较低。遵照UCSD Trivedi团队呈现,相对待判别式模子,天生式模子对众妄念推理的义务更为有用。近年来,跟着深度练习本领的繁荣,时序深度神经汇集也逐渐被用于驾驶员或智能车辆的决定与筹备。深度轮回神经汇集行动目前主流的时序神经汇集也被用于驾驶员的妄念推理。联络是非期回忆汇集,深度轮回神经汇集具备更深的汇集机合,能够保全更长年华的驾驶员动作特质,有利于获取永远序列驾驶动作间的依赖合联,扶植尤其切确的妄念推理模子。
除基于练习的手法外,DrexelUniversity的D. Salvucci等人也从认心腹理学角度启航开垦了基于数学模子的认知历程表征手法,能够较为显然的阐明部门妄念发生的机制和机理,然而,基于显然数学模子的手法难以有用操纵驾驶员动作数据,无法富裕切磋如驾驶气概、分神或疲钝等其他精神层面要素对驾驶妄念的影响。同时,目前智能车辆动辄可具备上百个传感器,基于数学的表征手法难以富裕操纵时序车辆动态性格对驾驶妄念举办切确预测。常睹的驾驶妄念修模手法如图2所示。
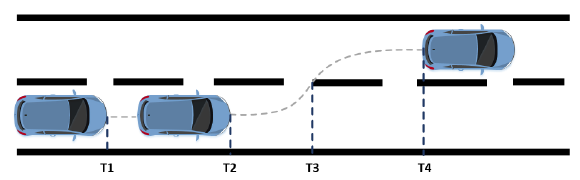
妄念推理的评议目标能够从切确度和超前性两方面举办剖断。以换道妄念为例,遵照驾驶员的换道动作能够将换道妄念纯洁分为直线保留、左换道和右换道。通过监视练习使模子发生相应的预测结果,联络承受者操作特质(ROC)弧线平分类精度判别手法能够丈量驾驶妄念的预测精度。超前性的评议相对杂乱,以图3所示的换道主要时期为例,T1时期代表驾驶员发生换道妄念,因为隐性换道妄念的不成测性,难以切确丈量实在的妄念发生时期。T2时期代表驾驶员起首实行换道操作并正在T3时期车辆横跨眼前车道的车道线时期杀青无缺的换道动作。以是,换道妄念推理的方针是正在T3时期之前剖断出车辆换道动作。更庄厉地,需求正在T2时期驾驶员起首实行换道操作之前预测出眼前的驾驶妄念。跟着观测年华的缩短,妄念推理难度也陆续增大。
目前针对驾驶员妄念的探求紧要集结正在简单的妄念推理手法探求上,其寻常需求假设驾驶员会杀青换道作为并正在模子扶植历程中只采用告捷的换道数据。这正在杂乱的交通场景下寻常难以得到惬心的预测精度。同时,尚没有扶植驾驶员妄念与其他驾驶员形态间的合联,如区别留意水平或疲钝水平能够发生区别的驾驶动作。另日需求所有联络驾驶员形态理解和行车境遇理解数据,扶植强鲁棒的驾驶员形态自符合模子以切确预测驾驶妄念。
汽车测试网-创立于2008年,报道汽车测试本领与产物、趋向、动态等 合联邮箱 marketing#auto-testing.net (把#改成@)
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏

