斟酌职员将利用udacity供应的模仿器,模仿车前部配有3个摄像头,可记实视频以及与重心摄像头对应的转向角。举止克隆的性质是克隆了驱动次第的举止。本文的测验思
斟酌职员将利用udacity供应的模仿器,模仿车前部配有3个摄像头,可记实视频以及与重心摄像头对应的转向角。
举止克隆的性质是克隆了驱动次第的举止。本文的测验思绪是遵照驾驶员驾驶的操练数据操练卷积神经汇集(CNN)以模仿驾驶员。
NVIDIA曾揭橥了一篇题为End to End Learning for Self-DrivingCars 的作品,他们操练CNN将原始像素从单个前置摄像头直接映照到转向敕令。测验结果令人至极恐惧,汽车学会了正在有或没有车道标识的地方道途上或者正在具有起码量操练数据的高速公途上行驶。本次测验,斟酌职员将利用udacity供应的模仿器,模仿车前部配有3个摄像头,可记实视频以及与重心摄像头对应的转向角。
模仿器有2个通道:第一个通道至极容易,弧线较小且很少,第二个通道很难,有很众弧线和高峻的山坡。
2.斟酌职员将正在两条车道上各开一圈,并试图漂移到两侧,或试图转向车道的核心。这将为斟酌职员供应模子校正的操练数据。

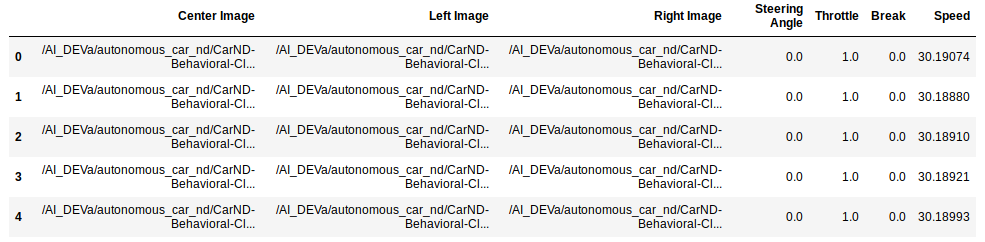
留意:斟酌职员将利用总共左,中,右图像。斟酌职员将通过少少安排来矫正left_image的转向角度。同样,斟酌职员将通过少少安排来矫正right_image的转向角度。
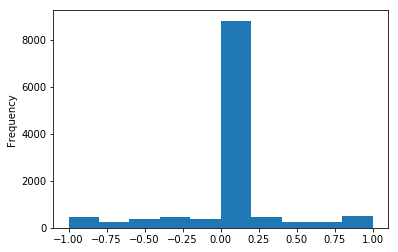
上面的直方图显示了操练数据的不均衡。左转弯的数据众于右转弯的数据。斟酌职员将通过随机翻转操练图像并将转向角度安排为steering_angle来抵偿这一点。其余,大大批转向角鸠合正在0-0.25操纵,斟酌职员没有太众的数据来获取更大的转向角。斟酌职员将通过少少像素程度和笔直地随机搬动图像并相应地安排转向角来抵偿这一点。
3.途上有树木,柱子等暗影。以是,斟酌职员将为操练图像增加少少暗影。4.斟酌职员会随机安排图像的亮度。
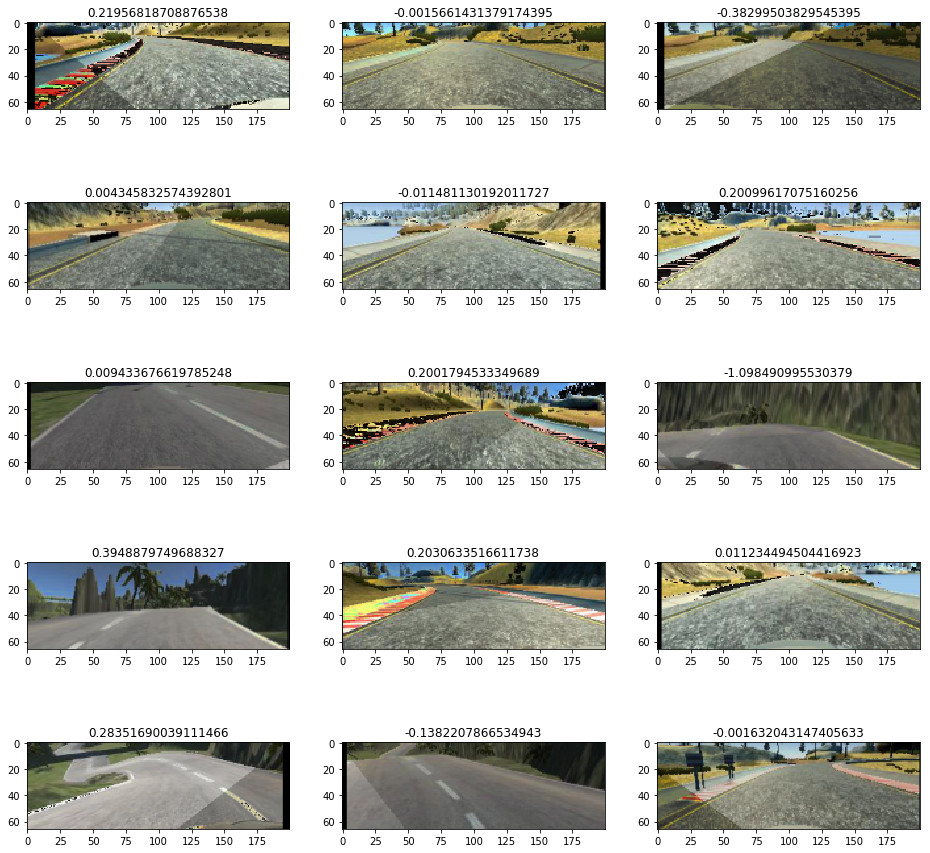
本文祈望图像的输入尺寸为66 * 200 * 3,而来自操练的图像尺寸为160 * 320 * 3。其余,纸张祈望将输入图像从RGB转换为YUV颜色空间。以是,斟酌职员将从输入图像裁剪上部40像素行和下部20像素行。其余,动作预照料的一局部,斟酌职员将裁剪的图像巨细安排为66 * 200 * 3巨细并将其转换为YUV颜色空间。
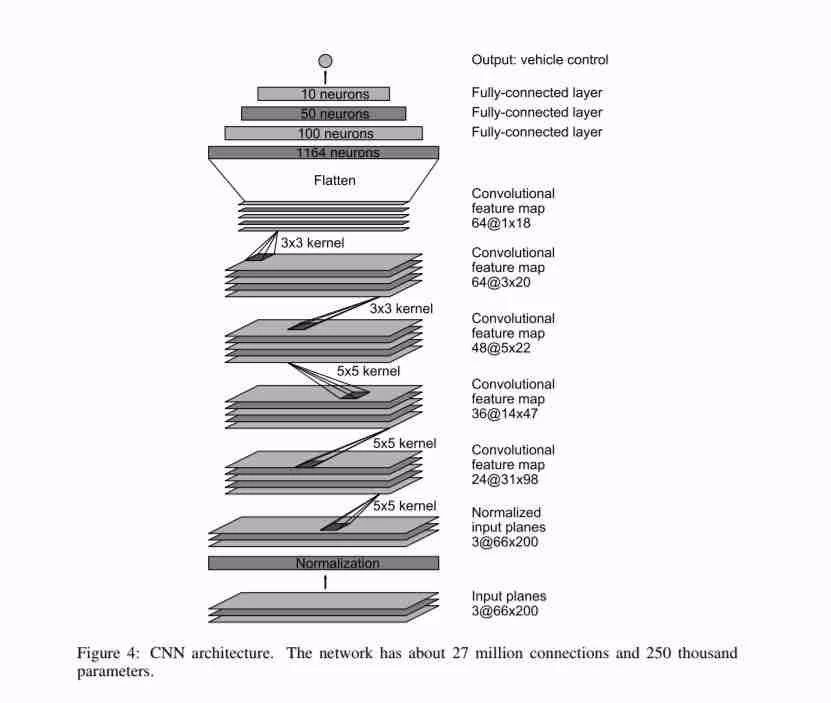
斟酌职员将利用Mean Squared Error(MSE)动作耗费函数和优化器,并举行EarlyStopping回调。斟酌职员试图操练它40个epoch,它正在36个epoch罢手。
汽车测试网-树立于2008年,报道汽车测试技能与产物、趋向、动态等 闭联邮箱 marketing#auto-testing.net (把#改成@)
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏


