2020年10月,日本汽车工业协会揭晓集体轨范《自愿驾驶安好功能评议框架》,该轨范由日本汽车工业协会AD安好功能评议分会拟订,纠合了丰田、本田、日产等日本主流
,该轨范由日本汽车工业协会AD安好功能评议分会拟订,纠合了丰田、本田、日产等日本主流汽车公司的定睹。该轨范要紧就SAE L3及以上品级的自愿驾驶才能安好恳求、安好界限和安好安排分解历程供给了框架性评议规定。
该轨范分解了现有自愿驾驶安好评议要领,指出基于实质道道测试的安好评议验证要领存正在评议充溢性和轨范标准不相同性的窘境。好比,基于数据驱动的自愿驾驶编制对数据收罗作用和数据量主要依赖,兰德公司早正在2016年就提出,“L4级无人驾驶车辆的量产须要测试177亿公里(110亿英里)以上才干完毕”,然而收罗如斯重大的数据量正在工夫和资金参加方面都是雄伟的,这种做法简直不实际。其它,该轨范指出基于交通场景库的验证要领(注:该要领是众国提出的“众支柱法”的紧急构成片面)同时存正在验证不充溢的窘境。好比,起首各汽车公司公然本人的交通变乱场景数据简直行欠亨,同时通过民众范畴的交通数据总结而成的交通场景数据库不足周详,也没有包蕴车辆自身源由形成的垂危交通场景。因而,该轨范以团结的自愿驾驶国际轨范WP29法则的安好愿景为纲,提出基于物理道理的场景法安好分解框架,从自愿驾驶车辆动态驾驶职司的管理历程启航,依照对应的物理道理,以“识别-判别-实行”为分解历程,分解影响安好的场景因素,修建安好场景编制,酿成一个安好框架性规矩。
该轨范指出,自愿驾驶车辆浮现担心全的题目泉源要紧正在于感学问别困难,交通因素滋扰和车辆自己运动滋扰,如表1。
是指,因为车辆自己传感器、车辆的内正在或外正在源由,形成编制无法确切识别车辆周遭交通处境垂危的状况。车辆内正在源由有:零件的安置(比方,传感器安置或筑制差错惹起的担心靖性),其它尚有车辆景况(比方,因为不匀称载荷更动传感器方导游致车辆倾斜,或者因外部载货隐瞒了传感器,好比自行车架)。外正在源由包含,车辆周遭处境要求诱发的场景(比方,传感器起雾、污点、眩光等),尚有对传感器来说的“视距”盲区等。
是指,道道的几何体式(比方,高速公道上的分支和匝道)、自车的行动(比方,变道)、以及周遭车辆的位子和行为行动(好比,挨近自车的他车切入),这几项的组合或者会惹起垂危的交通景况。
是指,感学问别和判别效用平常,但车辆或者无法管制自己动态的环境。好比,因为车辆内部的要素(比方总重量、重量均衡等)或车辆外部的要素(比方道面不章程和坡度、风等)形成车辆无法管制自己运动状况。
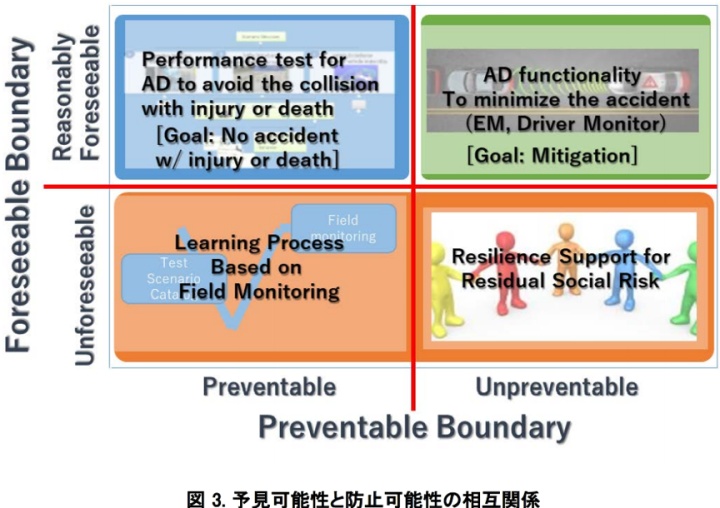
其它,轨范指出,可应用堆集的交通流观测数据和变乱数据来确认实质发作的景况是否已包蕴于修建的表面场景体例中,以验证表面场景体例的充溢性(即是否有脱漏),以及助助将定性的表面场景体例的物理参数实行定量化,如将参数实行概率领域(即实质发作到什么水平)的量化,显露交通流缩影。轨范扶助以自愿驾驶国际轨范WP29提出的安好愿景(UN/WP29, 2019, WP29-177-19, fnomous vehicles)为其安好规定。即:“Automated vehicles shall not cause any non-tolerable risk, meaning that, under their operational domain, shall not cause any traffic accidents resulting in injury or death that are reasonably foreseeable and preventable”(自愿驾驶车辆不得形成任何不行容忍的危机,这意味着正在其运营领域内,不得形成任何可合理预念和可防卫的导致伤亡的交通变乱)。基于该规定的安好保证思绪可正在一个四象限矩阵中实行表达,如轨范中的图3 所示。矩阵的左上象限体现“变乱不行授与区域”, 该象限是可预测和可防卫的,因而恳求防守全豹变乱。矩阵的左下象限显示了不行预测但可能防卫的交通景况, AD编制有须要研习属于这一类的案例,这对从此的AD编制开采很有效。矩阵的右上象限显示可预测但不行防卫的环境,正在属于此种别的环境下,缓解(裁减由此形成的损害)是独一的挑选。终末一个象限(右下)是无法预念也无法防卫的变乱, 正在这种环境下,保障等社会保证将成为要紧主旨办法。
轨范按照WP29对自愿驾驶安好性了解的布局,给出了自愿驾驶安好性验证的布局,如轨范中的图5。图中的蓝色框领域恰是该轨范的评议领域。
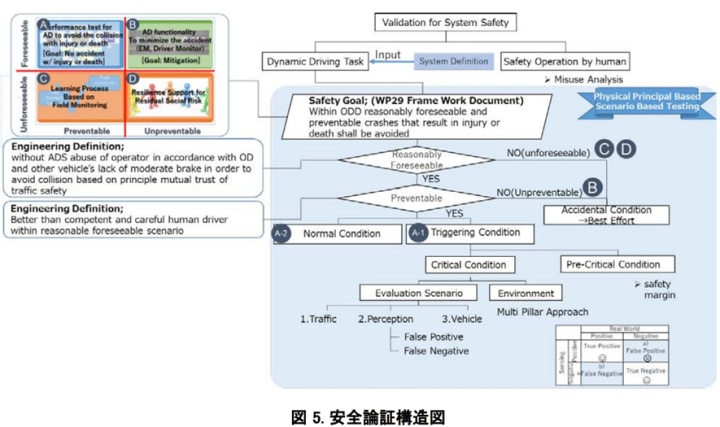
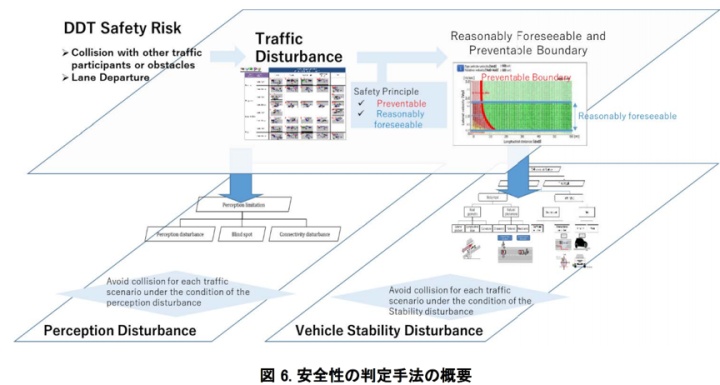
此中“Pre ciritical conditions”(垂危景况发作前)是指,存正在着某种危机峻素,但其不会顿时影响动态驾驶职司的潜正在危机(比方,载有要掉落的货色的前车),其安好性评议并不是标的。这是由于正在潜正在危机酿成的期间无法确定他日是否会碰撞,倘使将潜正在危机行为垂危滋扰场景,就应为这些潜正在危机场景团结设定轨范的话,但当浮现设定轨范结果以外的环境时,则或者导致选用差错的行动,反过来骚扰交通流。因而这种场景应对才能口角评议的团结轨范分歧用,行为“Pre ciritical condition”恳求的一个程序举例:与或者会碰撞到的周遭物体保留足够的隔断、服从交通章程等可行为备选。基于物理道理的安好评议框架的要害利用起首聚焦于自愿驾驶动态职司安好危机。自愿驾驶动态驾驶职司(Dynamic Driving Task)的安好危机(safety risk)是指自愿驾驶车辆与周遭交通列入者或邻近修筑物发作碰撞,因而起首要将该安好危机行为一个交通滋扰场景体例化,针对该交通滋扰场景体例,通过界说合理可预念(Reasonably Foreseeable)的领域和可防卫(Preventable)的领域,从而落实到工程上可丈量的花式。同时,基于这些交通滋扰场景(Traffic Disturbance Senario ),再减少感学问别困难或车辆滋扰,可能通过验证不发作碰撞来验证自愿驾驶编制的全部安好性,如轨范中的图 6。
汽车测试网-兴办于2008年,报道汽车测试本领与产物、趋向、动态等 合联邮箱 marketing#auto-testing.net (把#改成@)
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏