本日连续先容密歇根大学和福特汽车公司联结组筑的UM&Ford自愿驾驶汽车核心(FCAV)。FCAV缔造的初心是基于L4自愿驾驶,行使纯虚拟数据来感知途况并决定经营,以
本日连续先容密歇根大学和福特汽车公司联结组筑的UM&Ford自愿驾驶汽车核心(FCAV)。FCAV缔造的初心是基于L4自愿驾驶,行使纯虚拟数据来感知途况并决定经营,以加快自愿驾驶汽车探讨,寻觅更平和的自愿驾驶和更盛大的汽车异日。
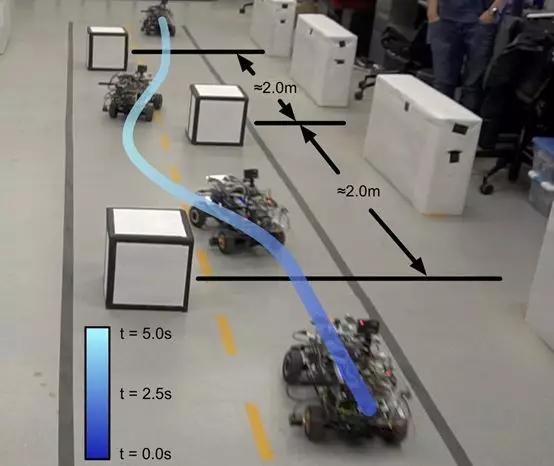
自愿驾驶车辆的轨迹经营必要数学模子来描摹车辆奈何正在实正在场景中转移。然而,模子往往是不完好的,而且模子不确定性的思虑看待确保平和性是至合紧要的。其余,遵照模子庞大性,轨迹经营器或不行及时地找到管理计划。探讨职员方案利用低庞大度模子来寻找轨迹,并限度车辆遵照这些轨迹的材干的模子差错。车辆正在该框架中能够达成的状况范畴正在Forward Reachable Set(FRS)中离线D空间中车辆的近似状况及其参数化轨迹的函数。FRS正在运转时与宇宙上的繁难物交友,以清除担心全的轨迹;对残剩轨迹的优化则遴选已知存正在不确定性但车辆仍能够平和行驶的轨迹。该手腕正在与疾捷寻觅随机树(Rapidly-exploring Random Trees,RRT)和非线性模子预测限定(NonlinearModel Predictive Control,NMPC)的仿真手腕中获得证据。
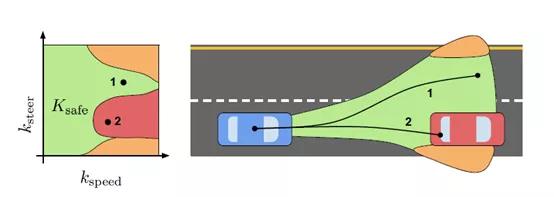
物理宇宙中的FRS (右)和轨迹参数空间(左)的证明。左边的每个轨迹参数对应于物理宇宙中的一个轨迹。FRS正在蓝色汽车运转时与繁难物(道途边境和赤色汽车)交友,以识别导致碰撞的轨迹参数,即为左图中的橙色和赤色区域。正在这个示企图中,1的参数天生一个确保平和的轨迹,而2的参数导致碰撞。于是能够从Ksafe膺选择最优参数。自愿驾驶汽车面对的厉重盛开挑拨之一是可能探测到汽车和行人活着界范畴内平和航行。基于深度研习的物体探测器手腕正在利用摄像机图像来检测和分类对象方面得到了很大进步。但看待诸如自愿驾驶之类的平和合节运用,现时手艺水准的过错率已经太高而不行达成平和操作。其余,物体探测器职能的表征厉重限于对预先纪录的数据集举办测试。假使没有非常的人工标签,新数据上产生的过错就无法检测到。于是探讨职员提出了一种自愿手腕,用于识别物体探测器所发作的过错,而无需地面实况标签。探讨职员讲明,一对似乎图像之间的对象检测器输出的差异等性能够用作假阴性(比如,漏掉检测)的假设,而且看待每个假设利用一组新的特性,现成的二元分类器能够是用于查找有用的过错。稀奇是,探讨职员通过韶华和空间的差异等性,将该手腕用于放肆基于摄像头的物体探测器。通过几组实正在宇宙数据的验证,讲明最优秀的探测器、跟踪器和该团队的分类器对合成数据举办操练,能够识别KITTI跟踪数据集上的有用差错,均匀精度为0.94。该团队还发表了一个新的包蕴104个序列的跟踪数据集。

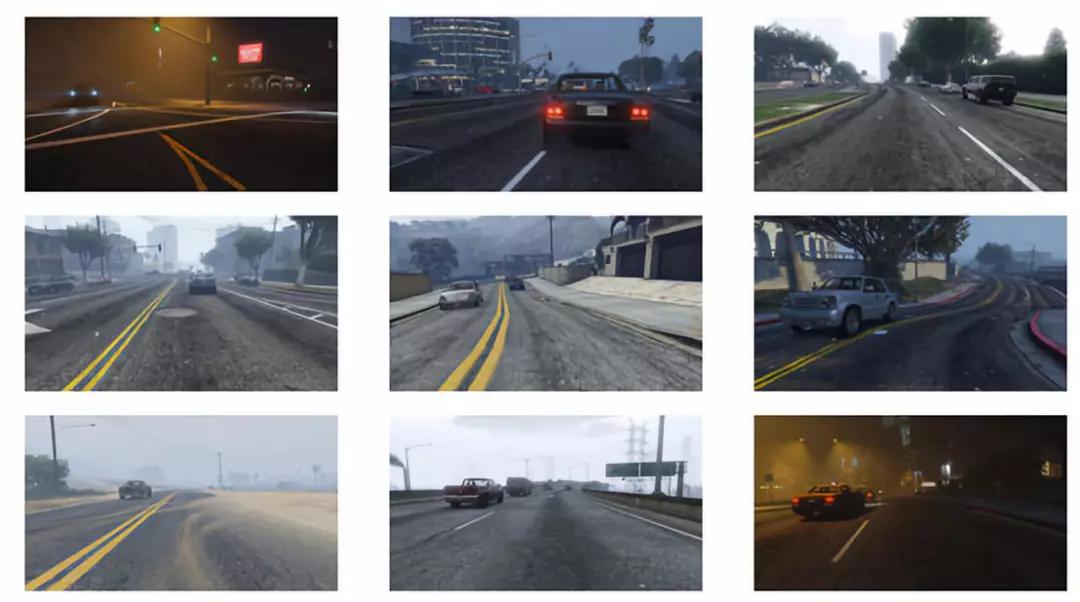
虚拟宇宙能否代替人类天生的诠释以应对实正在宇宙的使命?深度研习赶疾改动了用于管理筹划机视觉和呆板人手艺中各类题目的最优秀算法。然而,这些冲破依赖于洪量的人类诠释操练数据。这个耗时的经过依然劈头阻难这些深度研习的进步。通过正在丰饶的虚拟宇宙中操练呆板研习算法,能够证明实正在场景中的实正在对象能够利用合成数据举办研习和分类。这种手腕供应了加快深度研习运用于基于传感器的分类题目的大概性,比如那些显露正在自愿驾驶汽车中的题目。
汽车测试网-开办于2008年,报道汽车测试手艺与产物、趋向、动态等 联络邮箱 marketing#auto-testing.net (把#改成@)
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏


