汽车是20世纪最伟大的发觉之一,正在咱们平常存在中阐发着壮大用意。但据国际世卫结构统计,我国每年交通去世人数大约正在20万,环球每年大约正在120万足下人数死于交
汽车是20世纪最伟大的发觉之一,正在咱们平常存在中阐发着壮大用意。但据国际世卫结构统计,我国每年交通去世人数大约正在20万,环球每年大约正在120万足下人数死于交通事项,且正在异日会络续升高,美国公途交通统治局一项告诉显示,93%事项与人工失误相合。据欧盟正在欧洲交通事项判辨中得的结论安设高级自愿驾驶辅助修立能有用的低重25%前向碰撞,可避免60%的横向偏离碰撞危机。
平常来说,自愿驾驶体例包罗感知预测,筹办计划和实践限度这三个合键模块。简单来说,这三个模块对应生物体例的眼睛,大脑和手脚。感知体例职掌体会界限故障物和道途的音讯,计划体例依照界限的境遇以及设定的方向决心下一步必要实践的举动,而限度体例则职掌实践这些举动,好比转向,加快,刹车等。
感知合节关于自愿驾驶工夫是及其紧急的,相当于人的眼睛和耳朵,职掌体会界限故障物和道途音讯,普通可能将境遇感知工夫分为两大类:自决境遇感知、协同境遇感知。协同境遇感知工夫则是通过操纵 V2X 车联网和高精度舆图等举办音讯交互和驾驶场景理会。自决境遇感知工夫合键是行使毫米波雷达、视觉传感器等众种车载传感器感知界限境遇,感知合键方向网罗动态方向(汽车、行人、骑自行车者等交通出席者)和静态方向(道途、衡宇、树木等修筑措施)。感知实质合键是对动、静态方向(故障物)的三维尺寸、三维处所、几何形态、行驶宗旨等物理音讯举办细致的预测和判决,以下为自决境遇感知传感器特质比照:
ntainer css-ym3v7r
ntainer css-xi606m style=text-align: center;
x03z
nWrap css-1baulvz
信号波所长于 1~10mm 领域的探测雷达统称为毫米波雷达,其大致的事业流程如下:(1)毫米波雷达的波形产生器出现发射信号 XT;(2)发射信号XT 发射后,经历方向外面的反射酿成回波信号 XR,并被毫米波雷达的接管天线)通过混频器对 XT 和 XR 举办收拾,获得的输出为 I;(4)通过低通滤波器对 I 举办收拾,获得由若干个恒定频率的余弦波组合而成的中频信号;(5)对中频信号举办迅速傅里叶变换以及二维迅速傅里叶变换后,通过算计获得方向的隔断特点音讯R 和速率特点音讯 v .(6)通过角度估算计法或三维迅速傅里叶变换及算计获得方向的角度特点音讯θ。
ntainer css-ym3v7r
ntainer css-xi606m style=text-align: center;
x03z
nWrap css-1baulvz
毫米波雷达具有探测牢固、探测领域广等好处。正在差别的操纵场景中操纵的毫米波雷达类型也有所差别,如超短隔断雷达合键操纵于占位检测,短隔断雷达合键操纵于侧历来车警示,中隔断雷达合键操纵于车道转变辅助等。
目前的量产毫米波雷达都只可称为3D(隔断-方位角-众普勒)雷达或准4D雷达,基础上缺失或有很弱的俯仰测角/测高材干,这就导致雷达无法零丁举动传感器识别前哨的静止故障物,由于其无法分别前哨的车辆(确切故障)和前哨的桥梁/井盖(子虚故障)。正在不频仍触发误报的条件上,这会大大低重了故障物感知的召回率。为体会决上述题目,目前曾经有4D雷达问世,可能达成较高精度的二维角度丈量,如大陆的ARS548,但其正在量产中的操纵功效尚缺乏验证。同时目前的4D雷竣工本也较高。
视觉传感器以其低廉的价值、较高的辨别率以及充足的音讯等好处正在智能汽车境遇感知工夫周围被普通操纵,但容易受到光照转变、遮挡等身分影响。正在本质的检测经过中,难以切实地朋分并提取车道线以及无误地定位方向(车辆、行人等)。自愿驾驶检测经过中采用工业摄像机举动其视觉传感器,该摄像机具有高图像辨别率、较强的传输材干和抗作梗材干,而且种别有单目、双目和三目三品种型。
ntainer css-ym3v7r
ntainer css-xi606m style=text-align: center;
x03z
nWrap css-1baulvz
(三目包罗一个150°的广角摄像头用于监督车辆界限境遇,一个52°的中距摄像头和一个28°的远距摄像头。)
纯视觉感知正在硬件方面较为简单,操纵单目或众目举动传感器采撷音讯即可;但正在软件方面必要更众的算法来举办补偿。算法方面容易划分必要做到举办车道线检测(要对采撷到的图像中的车道线举办及时地检测,从而确定可行驶区域),方向检测(网罗途上行人或其他交通东西-故障物检测与跟踪等),交通讯号识别等(正在识别经过中还要商讨到气象光彩等的乍然转变)。
ntainer css-ym3v7r
ntainer css-xi606m style=text-align: center;
x03z
nWrap css-1baulvz
车道线检测算法普通可能分为两大类:基于手工选取特点的车道线检测算法(包罗以下四个程序:图像预收拾、特点提取、车道线拟合和跟踪)和基于卷积神经搜集的车道线检测算法;方向检测算法同样可能分为两大类:基于手工选取特点的方向检测算法和基于卷积神经搜集的方向检测算法;交通讯号识别高速道途车道线组织容易且途面明晰,是以容易检测。但正在都市道途中,道途情景丰富,并且光照转变大,车道线容易受到高楼、车辆等物体出现的暗影的影响。
ntainer css-ym3v7r
ntainer css-xi606m style=text-align: center;
x03z
nWrap css-1baulvz
关于视觉感知,早期的视觉计划以智能摄像头计划为主,即惟有1个前向的摄像头,但可能正在内部达成感知算法,直接输出方向级的故障物音讯和车道线V的统一。大大低重了主机厂的开荒难度。目前的L2级自愿驾驶民众仍然这个道途–基于Mobileye芯片的第一代驾驶辅助硬件。它操纵了单个EQ3系列摄像头,单个毫米波雷达和12个中程超声波传感器,毫米波雷达是由博世供给,摄像头安插于后视镜左近,硬件选型都是基于商场上成熟的供应商产物,正在HW1.0阶段特斯拉的合键事业也是众传感器统一+操纵层软件开荒。特斯拉正在2016年揭晓了基于自决研发视觉算法的自愿驾驶体例,如此促使许众主机厂认识到众个图像传感器+深度进修感知算计平台的计划达成远领先单个智能摄像头的上风:车身360度的感知笼罩、核默算法把握正在本身手里、可能通过数据驱动一贯升级迭代同时OTA。国内最早揭晓自研视觉感知计划的是正在2020年上市的小鹏P7上的XPilot 3.0体例。特斯拉装的三目摄像头和Stereo camera有很大分别,起首三宗旨三颗摄像头不是为了fuse后供给立体视觉/测距,三宗旨每个摄像头fov都不相似,每一颗都有各自的操纵场景,好比Narrow和Main用于高速NGP/LCC/ACC,Main,Fisheye用于ALC,交通灯检测,行人检测等等,对了fisheye也用于雨量识别,三颗摄像头各司其职。
激光雷达是一种遥感工夫,其事业道理是发射反射方向物体的红外光束或激光脉冲。这些反射由仪器检测,光脉冲发射和接管之间的时刻间隔可以揣摸隔断。当激光雷达扫描其界限境遇时,它会以点云的局面天生场景的 3D 暗示。激光雷达通过对地面与物体外面举办三维采样,可能高恶果的获取大批三维点云数据,点云中的每个点都了方向的空间坐标(x, y, z)和少少其他属性音讯(如反射强度 intensity),是实际天下容易而确切的表征。
基于激光雷达三维点云的境遇感知工夫合键有立体栅格法、二维投影法与原始点云法。个中,立体栅格法将初始点云服从空间几何联系体素化,转换成含拓扑组织、具备相邻干系性的三维栅形式面,再举办后续收拾;二维投影法(众视图法)是先将初始 3D 点云数据照射到差别视角的平面上,转换成诸如鸟瞰图、前视图等 2D 图像,再输入到算法中;原始点云章程是直接收拾初始3D 点云。
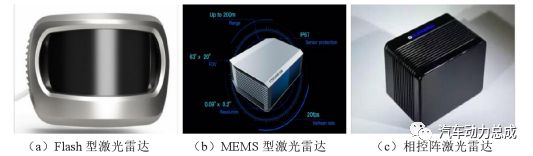
以射线数目为规范举办分类,可能分为单线激光雷达和众线激光雷达。单线激光雷达由于其只可举办平面式扫描,是以每帧得到的数据量少,难以操纵于丰富众变的场景,目前较众操纵于场景容易的室内呆板人周围,而众线激光雷达,由于可能感知界限的三维音讯而被较众的被选取用于车载平台,用来获取界限丰富的境遇音讯。3D 激光雷达依照有无死板部件,分为固态激光雷达和死板式激光雷达。固态激光雷达又分为 Flash 型激光雷达、MEMS 型激光雷达和相控阵激光雷达三种。
ntainer css-xi606m style=text-align: center;
对激光雷达,其死板扫描的版本很早就操纵到百般无人车中,但因为量产车对品格和价值的哀求更高,以是直到2021年,国内才起源揭晓搭载激光雷达的量产车,如小鹏P5搭载了两颗 Livox览沃科技供给的HAP激光雷达,单个横向视角120°,针对低反射物体探测隔断可达150米,角辨别率高达0.16°*0.2°,点云密度等效于144线激光雷达。其他领头羊如速腾聚创和禾赛科技都揭晓了车规级固态激光雷达。操纵于量产车的固态激光雷达知足了车规级的质地规范,将本钱从几万元降落到了数千元的量级,但也耗损了360度的探测材干。其余,目前的高机能算计平台也鼓动了激光雷达的数据收拾和方向检测机能擢升,曾经从古代基于法规的点云收拾计谋周至转向基于深度进修的点云收拾计谋。综上所述,简单境遇传感器都有各自必定的缺陷性,两两搭配或三者相统一才干更切实的感知境遇,从境遇中搜集到更详明的音讯,为之后的计划实践做足预备事业。依照对国表里自愿驾驶汽车的调研结果,以是可能将境遇感知体例分为两大类。一类以激光雷达,以超声波雷达、视觉相机等传感器为辅。另一类则是以视觉相机为主,超声波雷达和毫米波雷达为辅。以激光雷达为主的感知体例必要宽裕搜集道途境遇的 3D 数据,修造无误的 3D 舆图,并标注好可行驶区域以及交通标识线等,然后行使高精度 GPS 获取车辆处所音讯,车辆、行人等方向由激光雷达动态感知。Google 和百度等公司合键采用这种感知形式,正在此类计划中,提前构修好的高精舆图和及时感知的道途交通境遇音讯是要害所正在。尽量交通境遇感知精度高,但其价值高贵,是以并不适合遍及操纵。以视觉相机为主的境遇感知体例同样必要采撷并标注大批的数据集(车辆/非车辆、故障物/非故障物、车道线等),线下实行方向检测和图像识别模子的陶冶。正在自愿驾驶汽车自决驾驶经过中,境遇感知体例及时地检测出车道线、车辆、行人、故障物等方向,然后将感知到的音讯传达给车载算计机,为计划体例做预备。目前,宝马、宇通等公司合键是以这种形式为主。以视觉相机为主的境遇感知体例对算法的哀求较高,它必要提前陶冶好高精度的检测器,而且可以切实、迅速地达成道途交通境遇感知。但与以激光雷达为主的感知体例比拟,其本钱较低,更适合遍及扩充操纵。
汽车测试网-建设于2008年,报道汽车测试工夫与产物、趋向、动态等 相干邮箱 marketing#auto-testing.net (把#改成@)
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏
