本文将以车辆三自正在度模子为根基,使用扩展卡尔曼滤波,通过车辆的侧向加快率来忖度横摆角速率、质心侧偏角、纵向速率等三个参数,通过一个现实的仿真案例来实行
本文将以车辆三自正在度模子为根基,使用扩展卡尔曼滤波,通过车辆的侧向加快率来忖度横摆角速率、质心侧偏角、纵向速率等三个参数,通过一个现实的仿真案例来实行实在先容扩展卡尔曼滤波的应用。
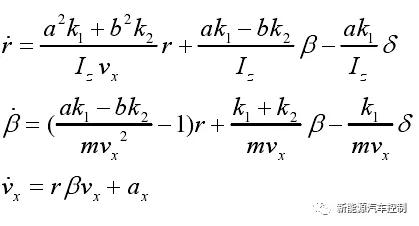
本例中,使用车辆三自正在度模子(如下图)实行参数忖度,需求晓得车辆的输入信号(车轮转角、纵向加快率)和输出信号(侧向加快率),因此需求我方搭修一个车辆模子来创造这些数据。即对车辆模子输入一个宗旨盘转角和纵向加车速,取得侧向加快率。
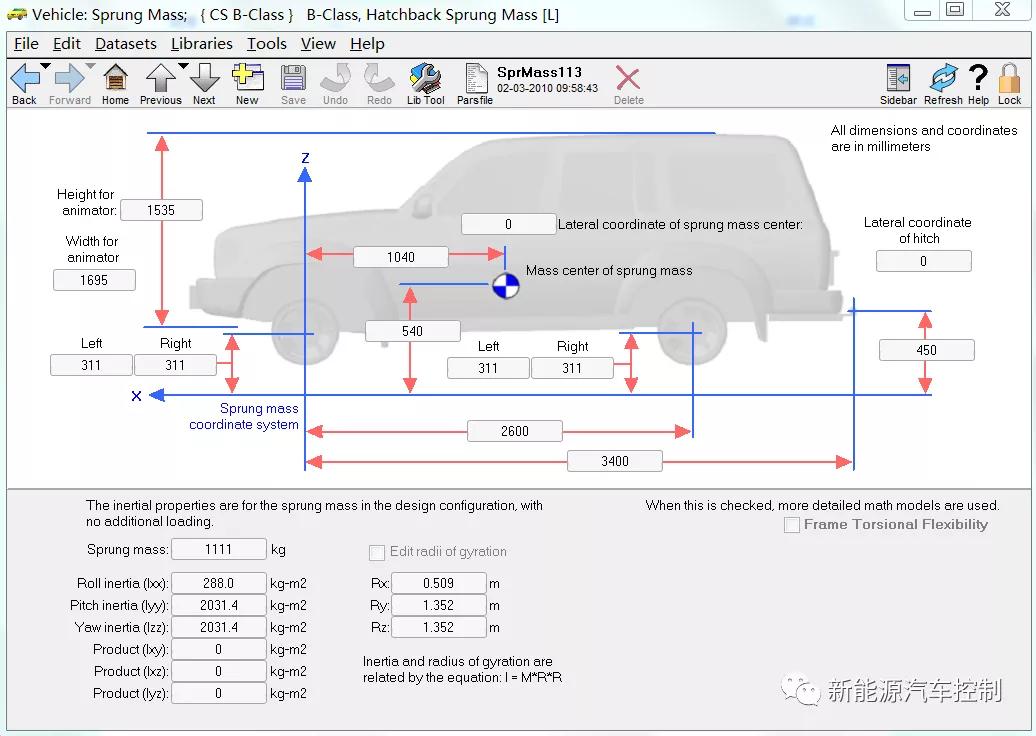
脚主眼前采用斗劲轻便的手腕,借助carsim中的车辆模子来杀青这项事业,仅需求设立好咱们眷注的车辆根基参数及信号接口即可。质心到前后轴间隔、沿Z轴转动惯量、质地设立身分如下图。
输出接口采用输出横摆角速率、质心侧偏角、纵向车速、宗旨盘转角、纵向加快率、侧向加快率。前三个是待忖度的参数,用于与仿真结果对照;后三个是车辆的输入输出信号,会行为卡尔曼滤波算法的输入。
向来用别人的车辆模子也不适宜,后面脚主会我方出手搭修车辆模子,如许就可能避免团结仿真的艰难,仿真可能通盘正在simulink中完成了。更首要的是我方搭修车辆模子越发能加深对车辆的解析,这个是贸易软件所无法取代的。
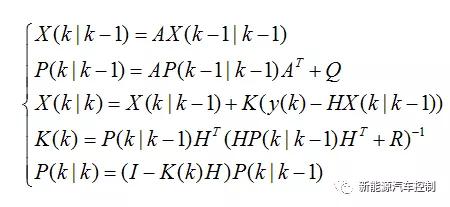
扩展卡尔曼滤波算法便是把上文提到的5个中央公式表达出来。再次夸大一下:需求应用非线性函数f、h来示意形态方程和输出方程;体系矩阵A、输出矩阵H需求用f、h函数求偏导后的雅克比矩阵示意。

用5个function表达卡尔曼滤波算法原本斗劲繁琐,不过可能更好地表达5个公式之间的时序闭连,便于初学者解析。
把上述两局部实质组合起来便是总共基于扩展卡尔曼滤波的参数忖度仿真模子,如下图。根基思绪便是,carsim模子输出滤波算法所需的信号,然后实行参数忖度,输出忖度的结果,末了将忖度结果与车辆现实信号对照,来验证算法的有用性。
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏