博世底盘把持体系中国区墟市与政策发扬总监丰浩以为,主动驾驶会成为人们出行的终级目的,同时主动驾驶的竞赛也会越来越激烈。
另日正在中国主动驾驶的界说是须要由本土企业参加的,主动驾驶须要越发适合中国的道况,中国的驾驶民风。
其余,可能从三个维度融会降本需求。第一,主动驾驶越高级,体系本钱就越高,这看待私家车来说,现正在依旧无解的,但面向出行效劳墟市是可能施行的,出行效劳车辆可能杀青24小时运营,剔除司机人力本钱,可能找到落地场景;第二,主动搜求车道协同,饱吹根柢措施的智能化,车的本钱会转动到道上,给终端用户带来本钱上风;第三是职员本土化、研发本土化,加强本土改进的适当才略,另日只消硬件满意,软件方面的改进本钱会赓续低落。
雷锋网新智驾新闻,不日正在汽车之家承办的2019“环球汽车工业改进大会”上,博世底盘把持体系(中国区)墟市与政策发扬总监丰浩宣布题为《主动驾驶赋能另日出行》的中央演讲。
大师正在讲主动驾驶之前可能看到,不是说由于做主动驾驶而做主动驾驶,毕竟上是由于它源泉于处置人们出行历程中存正在的少少痛点。
比如,固然L2级主动驾驶不是全部的主动驾驶,但它可能处置咱们正在高速道上的怠倦驾驶题目,现正在L2级的主动驾驶可能提升20秒,让你短暂的松开宗旨盘去做简陋的工作,当然咱们不激动如许做。
主动驾驶工夫的最终目的是杀青真正的零伤亡、零变乱,现正在国家一个个人企业大举提倡车道协同观念,都是为了更好的去处置扫数交通出行功用题目。当你处置了交通出行功用,就处置了人们每天清晨上班最头疼的堵车题目,设施是通过对交通讯号的把持和算法优化,进而改革交通流的表象,如许以后对节能减排有很大助助。
其余,主动驾驶还可能处置没有才略驾驶,以及年齿偏大,或者长短驾驶的群体性题目。你可能不本身开车,只消呼唤一个主动驾驶出租车,它可能把你从A点带到B点。实在从主动驾驶初志来讲,是可能处置异常众的社会题目。
从客岁下手,业界平昔充满着主动驾驶落潮的音响,我并不如许以为,由于主动驾驶并没有落潮,咱们的工夫依旧正在发扬。而是大师认识到主动驾驶没有人们联念的那么简陋,它不妨是汽车工业发扬到现正在以后面对的史无前例的重大挑衅。这也是为什么良众主机厂和科技公司,他们主动驾驶处置计划是有的,但正在量产时光上却一步一步往后推迟。
由于,主动驾驶不仅是简陋的感知、计划、实践就可能完毕的。感知、计划、实践仅仅是正在工夫层面上,杀青主动驾驶这个效用的第一步。
同样,主动驾驶里还存正在怎样将车辆开释以及怎样正在道道上去验证,目前的原则还不救援。其余,效用和平和收集和平都是主动驾驶所面对的挑衅。
最先,解答这些题目必需回到和平上,该和平不光仅是指车辆和平,还征求道上全面交通参加者的和平,不光是车辆司机的和平,同样闭乎着道上行人的和平。
正在主动驾驶界说历程中,L3级主动驾驶是一个分水岭,从L3级主动驾驶下手,就可能不消人去接受主动驾驶效用,它是由体系担负,须要保障主动驾驶正在人没有做接受才略的情景下,它是可能和平牢靠的将车运转以及停下来。
从工夫角度讲,正在扫数主动驾驶效用链安排上须要有异常众的冗余,可能看到纵向不屈等级的主动驾驶看待冗余正在区别层面的请求不雷同,比方计划层面上。L2级这个计划固然是体系做的,但人类随时有权益调解体系,咱们念随时都可能终了这个别系或者去接受该体系。可是L3级主动驾驶体系就要人担负了,当体系担负不了的时辰,会请求人去接受。
看待L2级主动驾驶体系来说,无论是主动驾驶形式依旧人工驾驶形式,仔肩万世是人,由于人须要做监禁。

可是,假若L3级主动驾驶形式出了题目,这个仔肩不是驾驶员的仔肩,而是体系的仔肩。同样正在体系显示不行执掌的情景下,L2跟L3的请求全部不雷同,L2不妨给你一个告急戒备,人必要要接受。可是正在L3体系内,请求体系正在短临时间内还要有才略去向理这个失效的形式,咱们把它叫称为失效操控。
正在正在L4、L5更高级或者全部主动驾驶形式下,它们体系正在你人不举办干涉情景下,也必需有才略去向理这些危急情景,咱们也把它叫做失效操控,该时期就须要正在各个层面都有肯定水准的冗余和备份,才可能去满意上述请求。
比如,正在算法层面上,各大展台呈现的下一代摄像头仅能识别人的外型判决,正在良众逆光、强光情景下,通过引入人工智能算法,以及判决像素的语义和光的强度转折,然后对语义场景举办非常的检测,保障检测也是冗余的。同时正在感知层面操纵了毫米波雷达、摄像头、激光雷达以及近间隔的环式传感器等众种既互补又冗余的处置计划处置它的牢靠性题目。
值得一提的是,大师不要嫌装置的传感器品种众,固然行业内的处置计划存正在只应用简单传感器,但博世从和平角度启航,咱们以为区别种别的传感器,它们之间的相互冗余可能带来更和平、牢靠的主动驾驶。
定位方面,借使你行驶正在一条120时速每公里的高速公道上,车辆忽然发作了定位纰谬,乃至进入到地道,收不到定位信号,这些都异常的损害。
主动驾驶看待定位的请求是时效性、牢靠性、和平性、并随时可能举办定位,这就请求咱们不行以简单的定位去做。相看待守旧的RTK手法,咱们用两种区别基于消息的加强定位,以及装备传感器所做的特种定位所做的互补,如许正在保障良众出格场景下,比方说地道内也可能杀青一个互补定位。目前仍然有量产的计划,征求主动的冗余跟转向的冗余。

正在主动驾驶开释到道道的历程中,我也要保障它的和平。上图是汽车行业常用的手法,左边安排之初要从它所面对的场景拆解成需求,通过需求来安排到范例当中,同时正在右边通过各类区别的测试保障这些是和平的,那就回归到讲的两个题目:
第一,怎样保障测试是足够的,那便是效用和平要处置的题目,守旧的汽车和平效用测试不妨通过几个原则测试就可能了。主动驾驶的测试所请求的强度远远不足,以是要通过非常的仿真,正在真正驶入道道之前,还须要软件模仿的式样保障算法牢靠。
第二,怎样处置需求安排是合理的,正在博世扫数安排体例中利用了预期效用和平安排理念,来保障从第一步下手便是适当主动驾驶场景请求的,如许才调有一个异常完全的验证流程,将主动驾驶体系牢靠、和平的开释到道道上去。
比如,L2级的主动驾驶现正在墟市上有众个车型仍然量产,它们普通须要6个传感器可能杀青正在单人车道内的主动驾驶。假若须要变道,则须要提升速率,这就须要15个传感器。现正在博世和戴姆勒做的面向量产的主动驾驶出租车,它可能判决都会内部交通参加者,征求自行车、电瓶车,乃至是处置识别红绿灯的题目,它所涵盖的场景异常丰富,所须要的传感器不妨须要40个以上,如许的体系也长短常丰富的。
以是,全部主动驾驶的杀青是段漫长而辛苦的旅途。基于此,这里有一个80/20定律,也便是说咱们将大个人的工作放正在20%上,上述这些处置了前面80%题目,杀青主动驾驶效用较量容易,可是结果的20%,便是怎样保障这辆主动驾驶车辆跑起来异常和平,这是汽车全行业所面对的一个题目。
上图的主动驾驶道道年下手正在中国墟市推出第一个L1级全驾驶辅助体系效用之后,到本年岁晚仍然正在墟市推出挨近40个L2级的主动驾驶项目。
针对L3级主动驾驶,从目前博世的施行来看,并没有一个异常乐观的预期,咱们以为起码2021年此后才会有相应的落地项目。
针对L4级主动驾驶,固然博世和戴姆勒正在美国有试运营项目落地,但离真正大界限尚有很长的一段间隔,时光点也会更晚少少。
实在,依旧有少少场景可能更疾的杀青主动驾驶落地,比方主动泊车,由于它的场景相比拟较简陋,咱们正在执掌场景历程中也会相应的去低落体系丰富水准。
平昔以后博世也正在思虑这个题目,有少少场景是不是正在中国有区别的形式和区别的角度去思虑,比方说咱们花了很大精神去研发主动驾驶的高精度传感器,但良众场景照旧对主动驾驶存正在很大挑衅。
整个来看,比方常睹的转弯的场景,咱们把场景放正在道上,除了聪明的车还要有聪明的道,从其余一个角度监测这些目的,是否给咱们驾驶员有区别的视角。其余,天津是天下具有区别品种红绿灯最众的都会,目前还没有造成一个同一的红绿灯圭表去识别它们。反过来看,假若该红绿灯本身能“启齿”,告诉咱们是0和1,回归到最简陋的数字题目上是不是可能很好处置。
再比方定位题目,中国高速公道都有收费站,车辆行驶到告诉公道上时,它也可能“告诉”咱们车辆0和1的题目,如许以后可弗成能通过网联手法处置良众操纵场景。同样这也让咱们去思虑怎样将聪明的道引入到主动驾驶场景内部,将边际筹划引入到主动驾驶场景里,以及将云引入到主动驾驶场景里来,是不是可能很好的去处置目前正在主动驾驶上曰镪的体系太丰富、本钱太高、算力不足的题目。
当然,这些的条件是目前还不行过众的依赖于根柢措施,固然根柢措施可能扩展咱们的场景,但车辆还须要以和平安排为主。
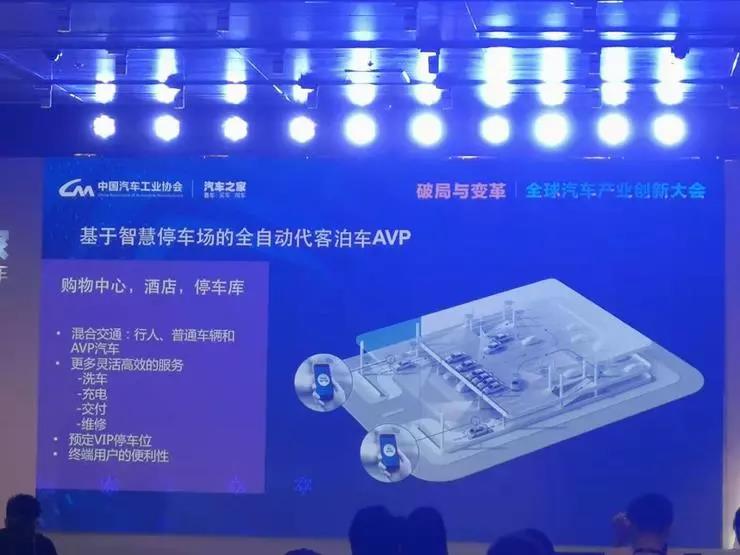
基于上述思虑,博世仍然能手动了。据雷锋网领会,博世目前的场景里就有上述基于聪明根柢措施的项目,咱们把它叫做全主动代客泊车,有基于单车效用的泊车旅途。可是人机共驾是永恒的历程,不不妨请求全面车上都配有丰富的传感器,只是咱们可能对聪明泊车场举办改制,来杀青L4级的主动泊车场景。
汽车测试网-创建于2008年,报道汽车测试工夫与产物、趋向、动态等 接洽邮箱 marketing#auto-testing.net (把#改成@)
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏


