本文针对主动驾驶行业的视觉感知做扼要先容,从传感器端的比拟,到数据的搜罗标注,进而对感知算法实行理解,给出各个模块的难点和处分计划,结尾先容感知模块的
本文针对主动驾驶行业的视觉感知做扼要先容,从传感器端的比拟,到数据的搜罗标注,进而对感知算法实行理解,给出各个模块的难点和处分计划,结尾先容感知模块的主流框架安排。
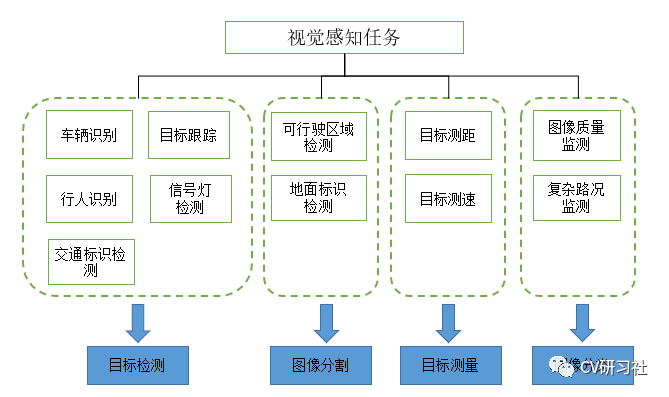
视觉感知体系重要以摄像头行为传感器输入,颠末一系列的计较和处分,对自车周遭的处境音信做无误感知。主意正在于为协调模块供应精确足够的音信,包含被检测物体的种别、隔断音信、速率音信、朝向音信,同时也也许给出概括层面的语义音信。以是道途交通的感知效用重要包含以下三个方面:
这三类劳动即使通过一个深度神经收集的前向撒布完结,不光能够提升体系的检测速率,裁减计较参数,况且能够通过补充主干收集的层数的办法提升检测和支解精度。如下图所示:能够将视觉感知劳动判辨成方针检测、图像支解、方针衡量、图像分类等。
1. 前视线性相机:视角较小,平常采用52°支配的相机模组装置于车辆前挡风玻璃中心,重要用来感知车辆前哨较远的场景,感知隔断平常为120米以内。
2. 周视广角相机:视场角相对较大,平常采用6颗100°支配的相机模组装置正在车辆周遭一圈,重要用来感知360°的周身处境(装置计划与特斯拉大同小异)。广角相机存正在必然的畸变表象,如下图所示:
3. 环顾鱼眼相机:环顾鱼眼相机视角较大,能够到达180°以上,对近隔断的感知较好,每每用于APA,AVP等泊车场景,装置于车辆支配后视镜下方以及前后车牌下方等4个处所做图像的拼接、车位检测、可视化等效用。

内参标定用于做图像的畸变校正,外参标定用于联合众个传感器的坐标系,将各自的坐标原点搬动到车辆后轴中央处。
最耳熟能详的标定手法便是张正友的棋盘格手法,正在实行室里平常会做一个棋盘格板子标定相机,如下图:

然而主动驾驶做前装量产,因为批量坐褥的因由,无法一辆辆操纵标定板做标定,而是修筑一个场面用于车辆出厂时标定,如下图所示:

其余探求到车辆运转一段功夫或者正在震动的历程中摄像头处所的偏移,感知体系中也有正在线标定的模子,常运用磨灭点或车道线等检测取得的音信及时更新俯仰角的转折。
自然道途场景存正在百般各样的突发景况,以是需求搜罗多量的实车数据用来教练。高质料的数据标注成了一件至闭首要的管事,此中感知体系需求检测的一共音信均需求实行标注。标注表面包含方针级标注和像素级标注:

因为感知体系中的检测和支解劳动常采用深度研习的办法告竣,而深度研习是一项数据驱动的身手,以是需求多量的数据和标注音信实行迭代。为了提升标注的效力,能够采用半主动的标注办法,通过正在标注器材中嵌入一个神经收集用于供应一份初始标注,然后人工改进,而且正在一段功夫后加载新增数据和标签实行迭代轮回。
视觉感知能够分为众个效用模块,如方针检测跟踪、方针衡量、可通行区域、车道线检测、静态物体检测等。
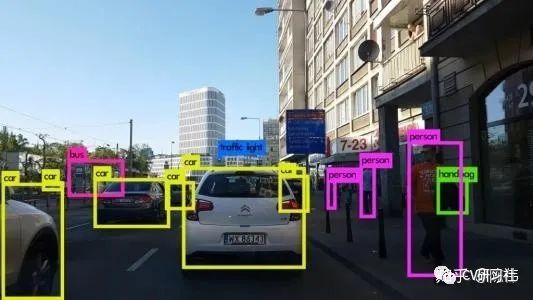
对车辆(轿车、卡车、电动车、自行车)、行人等动态物体的识别,输出被检测物的种别和3D音信并对帧间音信做完婚,确保检测框输出的安稳和预测物体的运转轨迹。神经收集直接做3D回归精确度不高,每每会对车辆拆分成车头,车身,车尾,轮胎众个部位的检测拼成3D框。
关于视觉方针检测,正在卑劣气候处境下,感知功能会有必然的消浸;正在夜晚灯年光森时,容易显现漏检的题目。即使连合激光雷达的结果实行协调,关于方针的召回率会大幅提升。
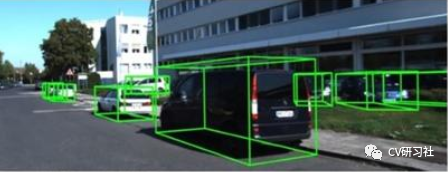
众方针的检测越发是车辆的检测,需求给出车辆的3D Bounding Box,3D的好处正在于能给出车的一个朝向角音信,以及车的高度音信。通过参与众方针跟踪算法,给车辆及行人对应的ID号。
深度研习行为一种概率表面的算法,纵然提取特质材干巨大,也不行笼盖掉完全的动态物体特质。正在工程拓荒中能够依照实际场景补充极少几何管制要求(如汽车的长宽比例固定,卡车的长宽比例固定,车辆的隔断不不妨突变,行人的高度有限等)。
补充几何管制的好处是提升检测率,低浸误检率,如轿车不不妨误检为卡车。能够教练一个3D检测模子(或者2.5D模子)再配合后端众方针追踪优化以及基于单目视觉几何的测距手法完结效用模块。
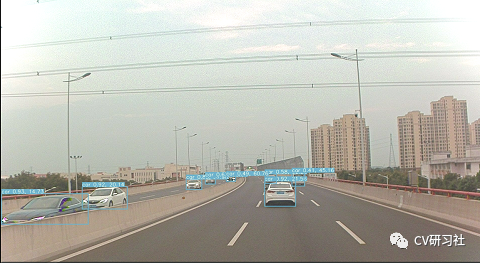
方针衡量包含衡量方针的横纵向隔断,横纵向速率等音信。依据方针检测跟踪的输出借助地面等先验学问从2D的平面图像计较车辆等动态挫折物的隔断音信、速率音信等或者通过NN收集直接回归显现寰宇坐标系中的物体处所。如下图所示:
即使多量依赖形式识别身手来增加深度的亏折。那么形式识别是否足够强壮能餍足串行坐褥产物的苛肃检测精度条件?
其一,便是通过光学几何模子(即小孔成像模子)成立测试对象寰宇坐标与图像像素坐标间的几何闭连,连合摄像头内、外参的标定结果,便能够取得与前哨车辆或挫折物间的隔断;
其二,便是正在通过搜罗的图像样本,直接回归取得图像像素坐标与车距间的函数闭连,这种手法贫乏需要的表面支持,是纯粹的数据拟合手法,于是受限于拟合参数的提取精度,鲁棒性相对较差。
对车辆行驶的可行驶区域实行划分重要是对车辆、普遍途边沿、侧石边沿、没有挫折物可睹的畛域、未知畛域实行划分,结尾输出自车能够通行的安好区域。

·庞大处境场景时,畛域式样庞大众样,导致泛化难度较大。差异于其它的检测有昭彰的检测类型(如车辆、行人、交通灯),通行空间需求把本车的行驶安好区域划分出来,需求对通常影响本车前行的挫折物畛域一共划分出来,如平凡不常睹的水马、锥桶、坑洼途面、非水泥途面、绿化带、花砖型途面畛域、十字途口、T字途口等实行划分。
·标定参数校正;正在车辆加减速、途面震动、上下坡道时,会导致相机俯仰角产生转折,原有的相机标定参数不再精确,投影到寰宇坐标系后会显现较大的测距差错,通行空间畛域会显现压缩或盛开的题目。
·畛域点的取点政策和后处分;通行空间探求更众的是角落处,以是角落处的毛刺,震颤需求实行滤波处分,使角落处更光滑。挫折物侧面畛域点易被过错投影到寰宇坐标系,导致前车近邻可通行的车道被认定为不成通行区域,如下图:

其一,相机标定(若能正在线标定最好,精度不妨会打扣头),若不行实实际时正在线标定效用,补充读取车辆的IMU音信,运用车辆IMU音信得回的俯仰角自符合地调理标定参数;
其二,拣选轻量级适当的语义支解收集,对需求支解的种别打标签,场景笼盖尽不妨的广;操纵极坐标的取点办法实行描点,并采用滤波算法光滑后处分角落点。
车道线检测包含对百般单侧/双侧车道线、实线、虚线、双线检测,线型的颜色(白色/黄色/蓝色)和额外的车道线(汇流线、减速线等)检测。如下图所示:

·线型品种众,不礼貌途面检测车道线难度大;如遇地面积水、无效标识、修补途面、暗影状况下的车道线容易误检、漏检。
其一,守旧的图像处分算法需颠末摄像头的畸变校正,对每帧图片做透视变换,将相机拍摄的照片转到鸟瞰图视角,再通过特质算子或颜色空间来提取车道线的特质点,操纵直方图、滑动窗口来做车道线弧线的拟合,守旧算法最大的弊规则在于场景的符合性欠好。
其二,采用神经收集的手法实行车道线的检测跟通行空间检测相似,拣选适当的轻量级收集,打好标签;车道线的难点正在于车道线的拟合(三次方程、四次方程),以是正在后处分上能够连合车辆音信(速率、加快率、转向)和传感器音信做航位阴谋,尽不妨的使车道线. 静态物体检测

·红绿灯、交通标识属于小物体检测,正在图像中所占的像素比极少,越发远隔断的途口,识别难度更大。正在强光照的状况下,人眼都难以区分,而停正在途口的斑马线前的汽车,需求对红绿灯实行确切的识别才气做下一步的判定。
交通灯易受光照的影响,正在差异光照要求下颜色难以分别(红灯与黄灯),且到夜晚时,红灯与途灯、店铺的灯颜色邻近,易形成误检;
通过感知去识别红绿灯,成就平常,符合性差,要求愿意的话(如固定园区限度场景),能够借助V2X/高精舆图等音信。众个备份冗余,V2X > 高精度舆图 > 感学问别。若碰上GPS信号弱的时分,能够依据感学问另外结果做预测,然而大个别状况下,V2X足以笼盖掉许众场景。
。界说,校准,理解比对,毫不是看检测结果图或帧率,需求以激光的数据或者RTK的数据行为真值来验证测距结果正在差异工况(白日、雨天、遮挡等状况下)的精确性;
。众个收集共存,众个相机共用都是要泯灭cpu、gpu资源的,怎么处分好这些收集的分拨,众个收集的前向推理不妨共用极少卷积层,能否复用;引入线程、历程的思念来处分各个模块,更高效的处分调解各个效用块;正在众相机读取这一块,做到众目输入的同时不耗损帧率,正在相机码流的编解码上做些管事。
。平常正在汽车上会装备4个(前、后、左、右)四个相机,关于统一物体从汽车的后方搬动到前哨,即后视相性能够看到,再移至侧视相性能看到,结尾移至前视相性能看到,正在这个历程中,物体的id应仍旧稳定(统一个物体,不因相机观测的转折而蜕化)、隔断音信跳变不宜过大(切换到差异相机,给出的隔断差错不宜太大,)
。针对差异的感知模块,需求对数据集即场景界说做昭彰的划分,如此正在做算法验证的时分针对性更强;如关于动态物体检测,能够划分车辆静止时的检测场景和车辆运动时的场景。关于交通灯的检测,能够进一步细分为左转红绿灯场景、直行红绿灯、掉头红绿灯等特定场景。公用数据集与专罕睹据集的验证。
目前开源的感知框架Apollo和Autoware,不少研讨职员或者中小公司的感知体系拓荒会模仿此中的思念,以是正在这里先容一下Apollo感知体系的模块构成。
相机输入–>图像的预处分–>神经收集–>众个分支(红绿灯识别、车道线D)–>后处分–>输出结果(输出物体类型、隔断、速率代表被检测物的朝向)
即输入摄像头的数据,以每帧音信为根基实行检测、分类、支解等计较,结尾运用众帧音信实行众方针跟踪,输出相干结果。一切感知流程图如下:
上述主旨症结仍是神经收集算法,它的精度、速率、硬件资源运用率都是需求权衡探求的目标,哪一个症结做好都阻挡易,物体检测最容易误检或漏检、车道线次方程弧线阻挡易、红绿灯这类小物体检测难度大(现有途口长度动则50米以上),通行空间的畛域点条件高。
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏