闭于作家Mustafa Saraoğlu 是德累斯顿工业大学主动化查究所的一名博士生,要点查究自助车辆及其组件的安静评估。我正正在与德累斯顿工业大学主动化查究所的同事们
Mustafa Saraoğlu 是德累斯顿工业大学主动化查究所的一名博士生,要点查究自助车辆及其组件的安静评估。
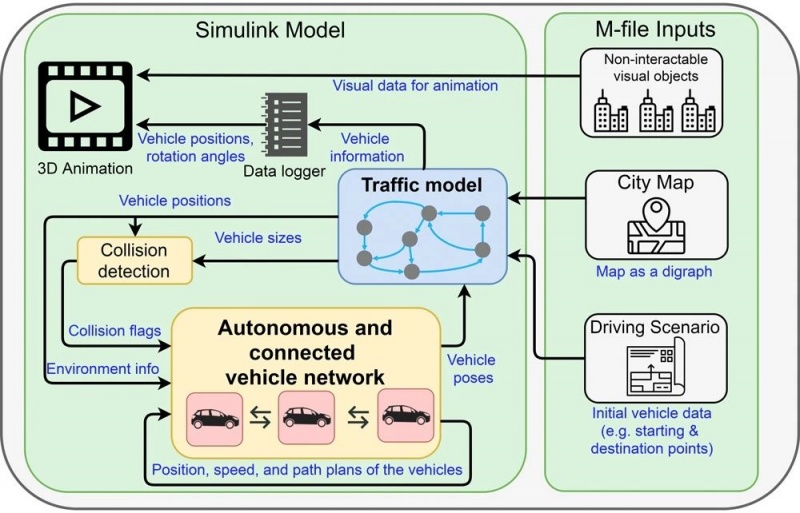
我正正在与德累斯顿工业大学主动化查究所的同事们协同查究 MOBATSim 仿真框架。工程师们能够行使此框架评估自助车辆的决定和限度算法、可视化算法职能,并判辨算法将对都邑交通境遇出现的影响(图 1)。
ink® 构修,让测试工程师能够正在分别场景下评估算法的效用安静,这不光网罗只要前车和后车的轻易仿真,也网罗有众辆汽车以分别速率行驶且可以存正在传感器或通讯编制毛病的纷乱境遇。正在打算初期,工程师能够将 MOBATSim 用作虚拟境遇以缩短测试时光并下降测试本钱,这个框架也顺应 ISO 26262 道途车辆效用安静程序。
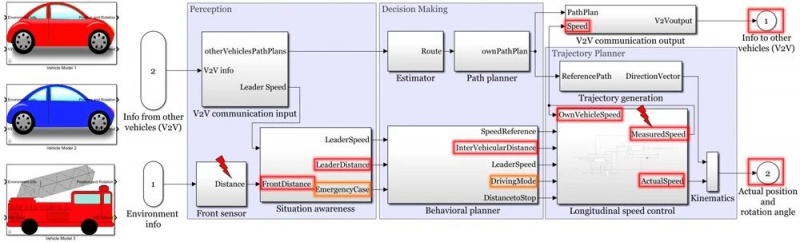
起初,开拓 MATLAB 算法,用于轻易的纵向(加快和减速)及横向(把握对象)车辆运动限度。将这些算法动作 MATLAB System 模块整合至 Simul
鉴于 MOBATSim 采用模块化架构,咱们能够正在项目发扬流程中无间抬高各组件(比方,传感器调解、车辆动力学和车辆间通讯)的保真度。为了加疾 MOBATSim 初始版本的开拓进度,咱们构修了这些组件的轻易模子;比方,原始纵向限度模子采用轻易通报函数相干加快率与车辆速率,但未切磋轮胎打滑或氛围阻力等要素。
ISO 26262 程序提倡采用毛病注入设施查究毛病组件及舛讹宣扬正在编制中出现的影响。MOBATSim 声援各类毛病注入计划,网罗传感器噪声、固定型毛病以及车辆对车辆 (V2V) 和车辆对根本措施 (V2I) 通讯收集延迟。
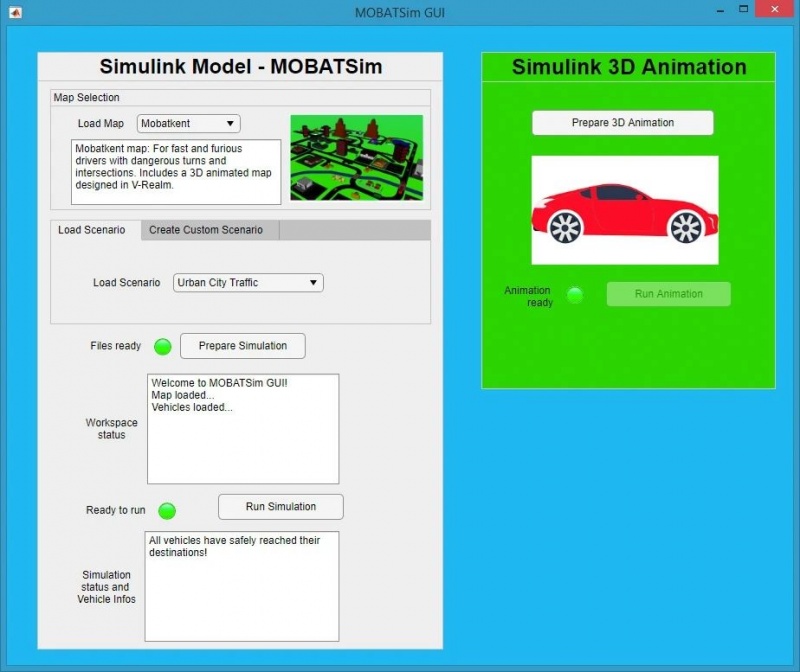
为了创修职能基线,起初依据理思(无毛病)运转条目正在 MOBATSim 中对算法举行仿真。还能够通过 MATLAB 文献或 MOBATSim 界面(图 3)指定仿真参数,如车辆数、车辆开始、止境、尺寸及最大速率。
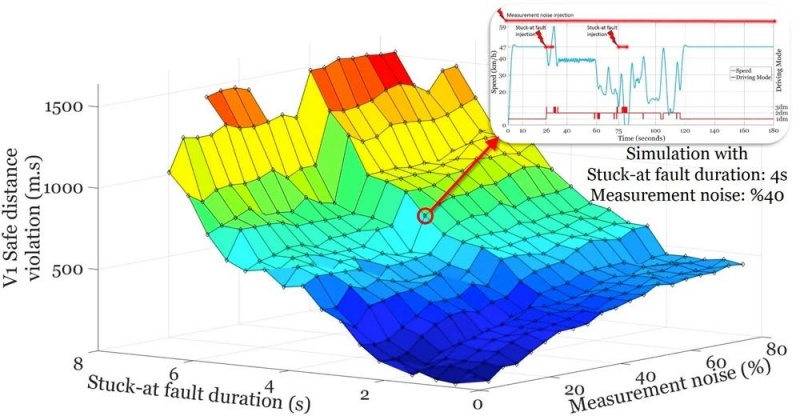
正在实际处境中,车辆可以同时发作众种分别水准的毛病。正在 MOBATSim 中,咱们能够运转多量仿真,以评估正在毛病逐步告急的条目下运转自助驾驶编制的安静性,查明起初发作失效的编制处所。比方,正在调剂固定型毛病不断时光的同时,咱们能够稳步抬高前向间隔传感器的噪声。正在 Simul
ink 中运转仿真后,咱们能够正在 MATLAB 中查看结果,识别车辆无法保留安静车距的境况(图 4)。
我是 MOBATSim 的首要开拓者,但尚有少少德累斯顿工业大学学生到场这个项目。少少学生肩负改良仿真框架的各个组件,另少少学生则利用框架自行发展查究。
近期的一个学生项目偏重查究交叉途口自助约束。学生利用 MOBATSim 开拓并仿真了一个约束编制,可最大水准缩短车辆通过冗忙途口的行驶时光并下降能耗。车辆正在驶近交叉途口时,利用 V2I 通讯发出信号来通密友叉途口约束算法并给与算法传回的信号,算法确保车辆安静,并优化都邑交通。
正在大无数 MOBATSim 仿真(网罗交叉途口约束项目举行的仿线D 动画流露车辆运动可视化效率就足够了。但正在最终演示中,咱们利用 Simul
ink 3D Animation™ 创修 3D 可视化效率,由于如此能够更传神地浮现动态编制行径(图 5)。

ink 的一共学生都能列入该竞赛。咱们的永远主意是面向汽车 OEM 执行采用 MOBATSim 来评估自助驾驶编制的效用安静。MOBATSim 开拓办事仍正在汹涌澎拜地举行,我将不停与德累斯顿工业大学学生互助饱动项目,巩固框架各个层面的保真度,抬高总体仿真精度。方针的加强效用网罗:主动化毛病注入;利用并行准备加疾仿真速率。同时,咱们的团队还正在踊跃查究增添新的主动驾驶和车辆动力学效用,网罗利用 Unreal Engine® 场景举行协同仿真,利用模子预测限度器更换某些专为车辆随从场景编写的算法。目前,咱们采用带外环间隔限度和内环速率限度的 PID,纵然速率疾、恶果高,但精度不足模子预测限度器。此外,咱们方针开拓 MOBATSim 开源版本并将其上传到 File Exchange。
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏