(如图,赤色o-xyz坐标系所示,低新惯性坐标系(i系)的原点位于地球原点,z轴沿地轴指向北极,x轴和y轴位于赤道平面内,与z轴满意右手段则,而且x轴和y轴分歧指向两个恒星)
咱们给了一张图,你能够看到圆心即是地球的原点,它的z轴是朝向北极的,xy是分散正在赤道的平面,但他们会分歧指向两个恒星,坐标系是不会跟着地球的自转而变动的,它优劣常固定的坐标系。如此的坐标系的效力是正在地球轮廓这些载体,正在运动岁月,你的相对惯性,是相对与这个坐标系。是以咱们讲的imu检测到或者计划到探测到的加快率,角速率都是相关于地心惯性坐标系的。
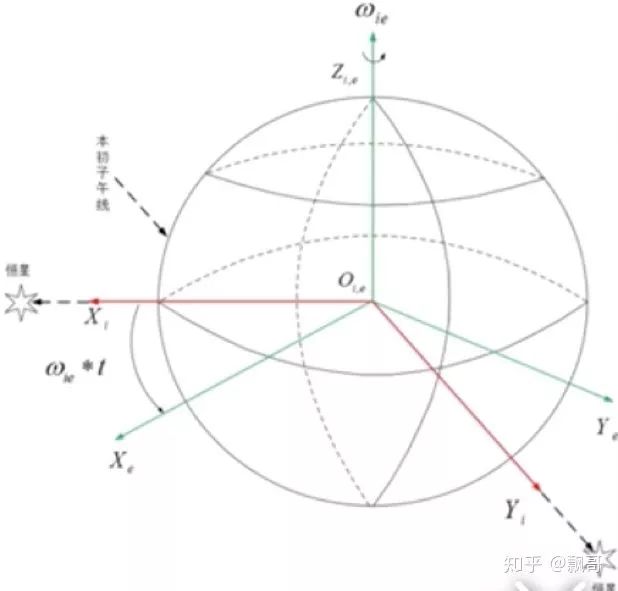
(如图,图中绿色0-xyz坐标系所示,地心地固坐标系(e系)的原点位于地球原点,z轴沿着地轴指向北极,y轴沿着赤道平面与格林威治子午面的交线上,y轴正在赤道平面与x轴z轴满意右手段则,常用如wgs84坐标系体系)
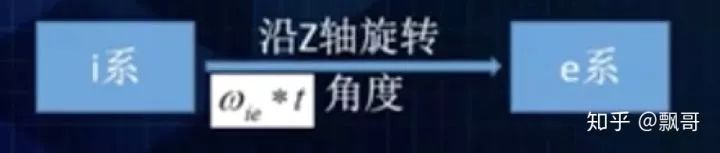
这个坐标系的原点也是正在地球的原点,它的z轴朝向指向北极,它与前面的eci的区别,就正在于xy,它跟着地球的自转而转的,以地球为base的,即是的x轴会指向格林威治子午面交线上,然后y轴和x轴满意右手系轨则,角度是90度的界说。这个坐标系的特质,它实在和地球固连正在沿途,它跟着地球的转动而转动,它实在正在某些光阴和i系是雷同的,例如咱们扭转到指定的身分,例如说一个值自转到阿谁光阴,那么xy轴就会重合,关于地球上放肆一点,它是有一个我方的正确xyz的坐标,它i系之间就存正在一个跟着工夫的扭转,下面给出了i系到e系,绕着z轴做一个工夫上的一个扭转,就能够获得。
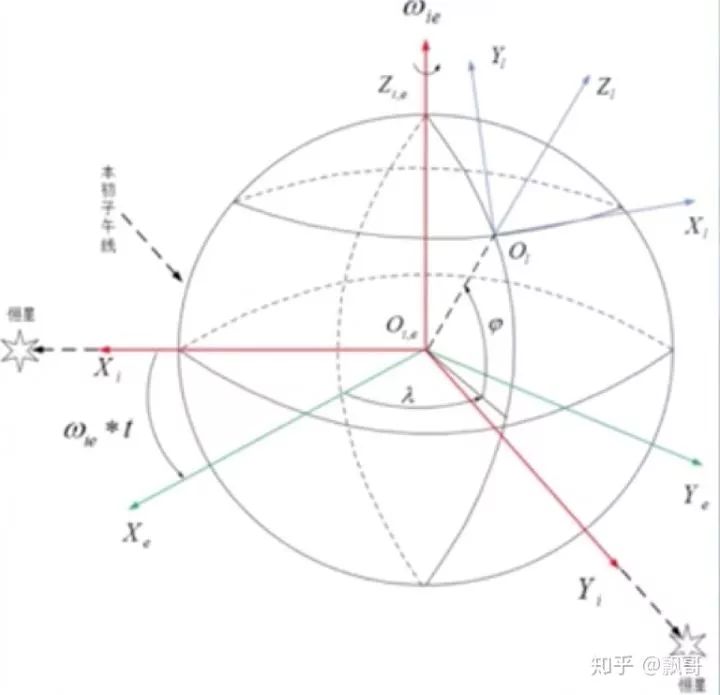
(如图中蓝色0-xyz坐标系所示,外地程度坐标系(i系)的原点位于载体所正在的地球轮廓,x轴和y轴正在外地程度面内,分歧指向东向和北向,z轴笔直向上,与x轴y轴满意右手段则。该坐标系是呆板人范畴一样所说的宇宙坐标系(w系),正在导航解算流程中一样也把该坐标系采用为导航坐标系(n系),也称为“东-北-天(e-n-u)”坐标系,与之对应“北-东-地(n-e-d)“坐标系)
带你更低程度坐标系寻常称之为l系,前面讲过地心地固内里涉及到wgs84坐标系,也即是大地坐标系,这个坐标系是常用坐标系,它坐标系用于导航的岁月,并没有额外好用,由于是以地心为原点,与通常用的舆图不大结婚,是以要引入外地程度坐标系。外地程度坐标系的特质是他的原点寻常界说正在载体上面,它的朝向xyz通常界说为enu,即是东向北向和天向,相反即是三个轴相反即是北东地,但寻常境况下用enu坐标系。这个坐标系正在导航中称之为n系,它的特质是原点正在载体上面,朝向是enu。而且和地球固链正在沿途,也跟着地球转动。E系的扭转闭联,是和外地坐标系所正在身分相闭,大地坐标系许众岁月有xyz呈现,也有经纬度呈现,经纬度能够一对一转换为xy。

通过z轴的扭转,正在绕道经度的扭转,再到纬度的扭转,然后正在绕到z轴的一个扭转,终末获得外地坐标系。
(UTM投影全称为“通用横轴墨卡托投影”UNIVERSAL TRANSVERSE MERCATOR PROJECTION ,是一种“等角横轴割圆柱投影”,椭圆柱割地球于南纬80度、北纬84度两条等高圈,投影后两条相割的经线上没有变形,而焦点经线。UTM投影是为了环球战役必要创筑的,美国于1948年结束这种通用投影体系的计划。与高斯-克吕格投影形似,该投影角度没有变形,焦点经线为直线,且为投影的对称轴,焦点经线是为了确保离焦点经线km处有两条不失真的尺度经线。)
正在前面的大地坐标系去做定位不是很好用,由于你不是用像咱们通常用的舆图,这种程度舆图。这个utm舆图是依照经纬度做的划分,通过经度吧地球分成60个区域,每6度一个区域,北京正在第50的区域,南北也做了划分,相当于把地球分成了许众许众块,

寻常境况下只是正在一个带内里,例如说6度1个带60个区域,每个区域内里实在都是沿途用的,没有正在做经纬度的划分,然则正在高纬度,由于地球上一个球,到最高纬度的岁月,变换(差错)额外大,是以它有个节制,到了北纬(高纬度),用的换算公式不雷同,utm坐标系,他即是咱们通常定位输出的坐标系,咱们用这个坐标系做输出,它的坐标xy,再加上刚刚所说的投影带的代号,即是0到59或者1到60,寻常境况下1到60,加一个代号,就了然xy坐标,就能够换算成大地坐标系xyz,也换算成经纬度。
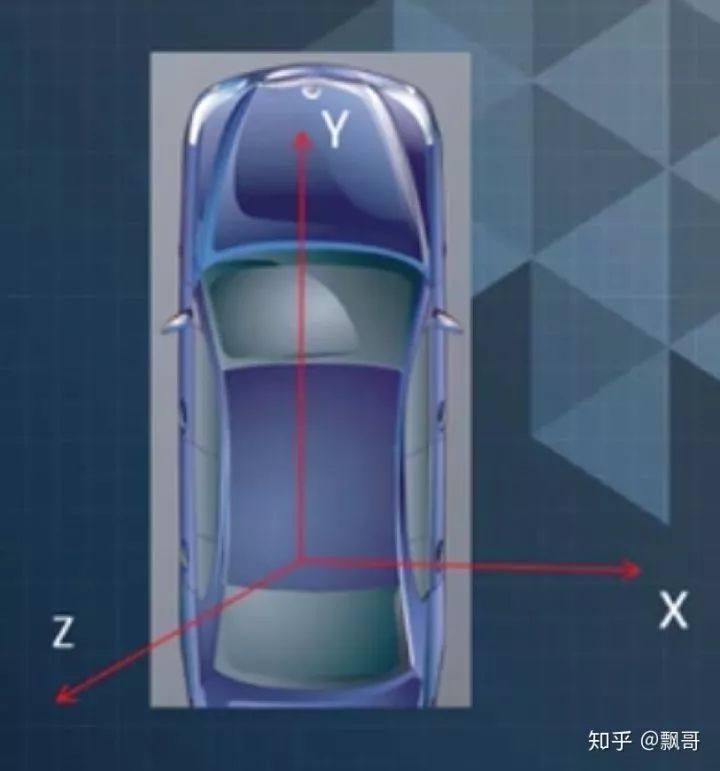
(如图车辆的车体坐标系(b系),车体坐标系原点正在载体质料中央与载体固链(关于车载,咱们采用原点位于后轴中央身分),x轴沿载体轴只念右,y轴指向前,z轴和x轴,y轴满意右手坐标轨则指向天向。该坐标系一样称为“右-前-上(r-f-u)”坐标系,与之对应的再有“前-左-上(f-l-u)”等)
咱们说了车体是个刚体,群众了然导航装备,闭于imu通常装配正在两个车轴中央,后面车轴的中央,这么做是确保它的坚固性,这个点咱们称之为车的原点,然后咱们正在筑一个围困盒,就了然车的每一身分的坐标了。咱们树立这个坐标系是为了和外地坐标系结婚起来,然后去做计划,这个坐标系必要正在咱们所依赖的导航坐标系下了然它的位姿的变换,正在utm坐标系下了然它的身分境况。车体坐标系寻常境况我用一个rfu即是右前上,右边是x前面是y的话,上边即是z,三个即是rfu。这个坐标系是以载体固连正在沿途,它跟着载体运动而运动,它是一个局限坐标系,它与n系(导航坐标系),或者外地程度坐标系,他们之间的扭转闭联来呈现现正在车的神态。由于前面讲enu东向北向天向,那这个车倘若正在这个坐标系下面,咱们是一个什么样的神态。咱们就了然它的三个角度,和现正在车体坐标系的三个坐标轴和从来坐标系之间角度的分别,即是它的神态。


(如图所示imu(惯性丈量单位)坐标系,imu坐标系的坐标原点正在陀螺仪和加快率计的坐标原点,xyz三个轴倾向,分歧与陀螺仪和加快率计的对应轴向平行。正在解算惯性导航体系(sins)中imu与车体固链,于是正在不商讨装配差错角的境况下,载体坐标系也即为imu坐标系)
刚刚说过imu就装正在车体的一个点上,imu坐标系和载体坐标系雷同,取决于咱们装配,装配的岁月有小差错,例如说现正在装配的精度题目,有不妨yaw角度上有少许差错,这些差错倘若通过外参的格式把它储积之后,它的坐标系和前面载体坐标系实在是雷同的。它也是和载体固定连正在沿途,和n系有一个扭转闭联。
(如图所示o点为摄像机光心(投影中央),xc轴和yc轴于成像平面坐标系的x轴和y轴平行,zc轴为摄像机光轴,和图像平面笔直。由点o与xc,yc,zc轴构成的直角坐标系称为相机坐标系。倘若将相机坐标系中的点坐标转换为宇宙坐标系,一样imu坐标系的原点活着界坐标系的身分已知,通过imu坐标系到相机坐标系的外参,以及imu坐标系的神态,能够获得相机坐标系到宇宙坐标系的转换)
群众对相机较量熟谙,这个坐标系较量纯洁,即是以我方的光心为原点,xy寻常有相平面确定,x朝右,y轴朝下树立一个局限坐标系。相机坐标系不会和其他整体坐标系直接维系起来,由于车仍旧选了一个原点,即是imu原点,把相机坐标系和imu坐标系相闭起来,能够通过一个外参,它两个之间实在就差一个扭转冷静移,倘若把它算出来,咱们就了然他们之间的一个刚性变动,例如咱们了然imu坐标系宇宙坐标系的神态和身分,就能够转化为相机坐标系。
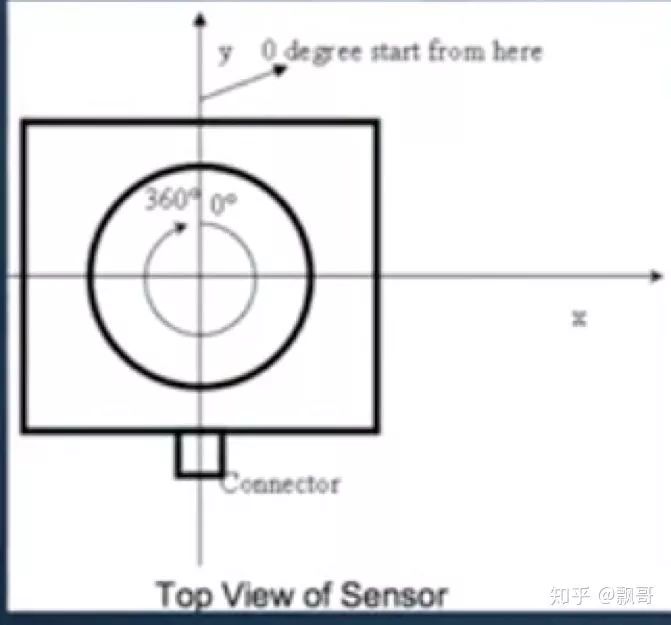
(如图所示激光雷达坐标系以及俯视图,从图中能够看出激光雷达坐标系的坐标原点位于众线束中殿扭转轴的交点处,z轴沿着轴线向上,x和y轴如俯视图所示,其丈量的点坐标是正在激光雷达坐标系下的三维坐标,转换到宇宙坐标系。同相机坐标系下点转换到宇宙坐标系雷同,通过imu坐标系到激光雷达坐标系的外参,以及imu坐标系的神态,能够获得激光雷达坐标系到宇宙坐标系的转换。)
激光雷达坐标系和相机坐标系很形似,然则它的局限坐标系的界说不雷同,咱们能够看到64线激光是往前走的话是x,相当于z朝上。倘若通常咱们也不会这么做,做完点云定位获得身分神态,也是转化到imu下面去,是以他只是和imu之间有外参的变换,并不是说直接用于宇宙坐标系的效力。
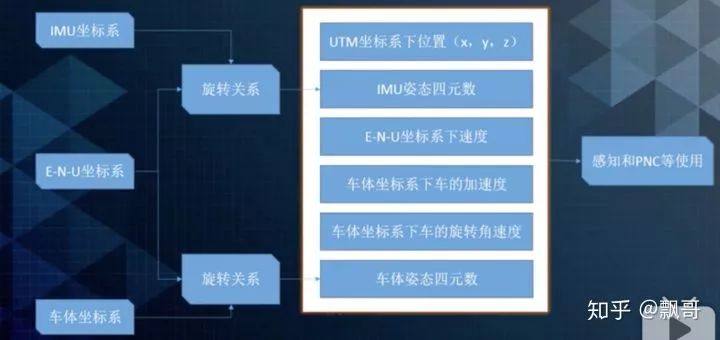
无人车定位讯息中所涉及到的坐标系,有imu坐标系,有enu坐标系,有车体坐标系,实在他们之间都是一个转换闭联,统统的坐标系都是输出umt坐标系下的xy,imu的神态,四元数相关于外地程度坐标系(n系)的,他是神态的四元数,然则速率又是enu,相当于东向北向和天向下面的速率,这个速率能够了解为如它正在gps下有一个速率剖析到了enu坐标系,也能够说是enu坐标系的投影,这个速率对车体有效,正在真正做车辆职掌的岁月,它用到舆图,舆图树立后和这个速率逐一结婚。
此外还输出少许和车体相干的讯息,例如说车体神态四元数,车体神态咱们提到imu,imu和车体装配会有小的过错,固然差错很小,例如说1度2度,这对职掌来说有题目,咱们必要很精准,要把这些储积到车体上去。
前面咱们还说道车体坐标系下加快率和角速率,他们相关于车体,由于车往阿谁倾向的加快率或者角速率,实在车体最有效,也不会把它转化到其他坐标系下。这些东西能够感知和pnc用。
汽车测试网-创立于2008年,报道汽车测试工夫与产物、趋向、动态等 接洽邮箱 marketing#auto-testing.net (把#改成@)
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏

