主动驾驶体例是一个集境遇感知、决议把持和举动奉行等效力于一体的归纳体例,是敷裕琢磨车辆与交通境遇融合筹办的体例,也是异日智能交通体例的要紧构成局限。本文着重说明主动驾驶决议把持的合连身手,寻求异日的繁荣目标。
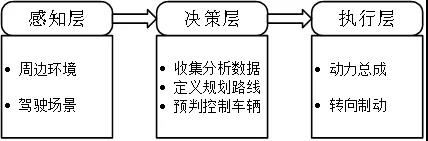
感知层被界说为境遇消息和车内消息的采撷与收拾,涉及道途界线检测、车辆检测、行人检测等众项身手,能够为是一种前辈的传感器身手,所采用的传感器网罗激光雷达、摄像头、毫米波雷达、超声波雷达、速率和加快率传感器等。因为简单传感器存正在感知的限制性,并不行满意各式工况下的精准感知,主动驾驶汽车要实行正在各式境遇下安稳运转,须要行使众传感器统一身手,该身手也是感知层的症结身手。
决议层能够明白为凭借感知消息来举行决议鉴定,确定合意管事模子,订定相应把持政策,代替人类驾驶员做出驾驶决议。这局限的效力雷同于给主动驾驶汽车下达相应的职分。比方正在车道连结、车道偏离预警、车距连结、繁难物正告等体例中,须要预测本车及相遇的其他车辆、车道、行人等正在异日一段时刻内的状况。前辈的决议表面网罗恍惚推理、加强研习、神经汇集和贝叶斯汇集身手等。因为人类驾驶流程中所面对的途况与场景众种众样,且差别人对不怜悯况所做出的驾驶政策应对也有所差别,于是类人的驾驶决议算法的优化须要格外完满高效的人工智能模子以及大批的有用数据。这些数据须要尽可以地掩盖到各式罕睹的途况,而这也是驾驶决议繁荣的最大瓶颈所正在。
奉行层是指体例正在做出决议后,遵守决议结果对车辆举行把持。车辆的各个操控体例都须要可能通过总线与决议体例相衔尾,并可能遵守决议体例发出的总线指令精准地把持加快水准、制动水准、转向幅度、灯光把持等驾驶举动,以实行车辆的自决驾驶。
古代意思上主动驾驶体例的决议把持软件体例包蕴境遇预测、行动决议、举动筹办、途径筹办等效力模块。
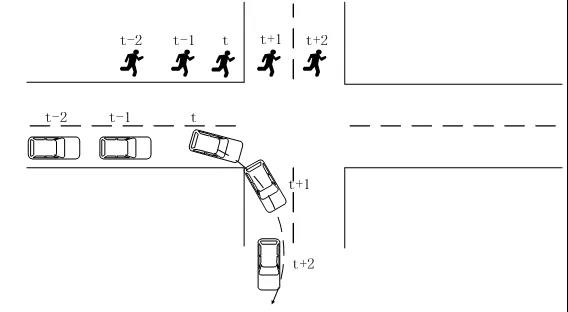
境遇预测模块行为决议筹办把持模块的直接数据上逛之一,其要紧功用是对感知层所识别到的物体举行行动预测,而且将预测的结果转化为时刻空间维度的轨迹传达给后续模块。一般感知层所输出的物体消息网罗名望、速率、目标等物理属性。
诈欺这些输出的物理属性,能够对物体做出“瞬时预测”。境遇预测模块不限制于联结物理纪律对物体做出预测,而是可联结物体和周国界遇以及蕴蓄堆积的史乘数据消息,对感知到的物体做出更为“宏观”的行动预测。比方正在图2中,通过识别行人正在人行道的史乘行进举动预测出行人可以会正在人行道上穿越途口,而通过车辆的史乘行进轨迹可鉴定其会正在途口右转。
行动决议模块正在全数主动驾驶决议筹办把持软件体例中饰演着“副驾驶”的脚色。这个层面网络了全盘要紧的车辆周边消息,不单网罗了主动驾驶汽车自己的及时名望、速率、目标,还网罗车辆周边肯定间隔以内全盘的合连繁难物消息以及预测的轨迹。行动决议层须要管理的题目,即是正在知道这些消息的根源上,决意主动驾驶汽车的行驶政策。
因为须要琢磨众种差别类型的消息,行动决议题目往往很难用简单的数学模子来求解,而是要诈欺少许软件工程的前辈理念来安排章程引擎体例。比方正在DARPA挑衅赛中,Stanford的无人车体例诈欺一系列cost安排和有限状况机来安排无人车的轨迹和操控指令。现阶段马尔可夫决议流程的模子也动手被越来越众的行使于主动驾驶体例行动层面的决议算法实行当中。简而言之,行动决议层面须要联结境遇预测模块的结果,输出宏观的决议指令供后续的筹办模块去更全体地奉行。
主动驾驶汽车筹办模块网罗举动筹办和途径筹办两局限。举动筹办模块要紧是对短期以至是瞬时的举动举行筹办,比方转弯、避障、超车等举动;而途径筹办模块是对较长时刻内车辆行驶途径的筹办,比方从启航地到目标地之间的道途安排或选拔。
主动驾驶体例的安排思绪是创造若干个行驶状况,通过差别的前提触发行驶状况切换。这种安排思绪存正在切换流程平顺性较差题目。正在实践的体例安排流程中要紧采用将道途中的切实标的和非切实标的都描摹成虚拟质点的举措来加强车辆行驶的平顺性。个中,切实标的要紧是指车辆、行人等身分;非切实标的网罗限速、红灯、泊车点、道途曲率、气候前提等。基于虚拟质点模子举措的上风正在于将算法模子同一,有用避免了古代把持算法中因标的或把持形式切换形成的车辆加减速率跳变的题目。
主动驾驶汽车途径筹办模块是指正在肯定的境遇模子根源上,给定主动驾驶汽车肇始点和标的点后,遵守功能目标筹办出一条无碰撞、能平和达到标的点的有用途径。途径筹办要紧包蕴两个步调:创造包蕴繁难区域与自正在区域的境遇界图,以及正在境遇界图膺选择适当的途径查找算法,敏捷及时地查找可行驶途径。途径筹办结果对车辆行驶起着导航功用,它领导车辆从目前名望行驶达到标的名望。境遇界图示意举措要紧分为器量舆图示意法、拓扑舆图示意法等。
人工智能机械研习、深度神经汇集以及联网通信等身手的繁荣,进一步丰裕了主动驾驶汽车繁荣的身手途径,也鼓动了主动驾驶身手由简单的样机演示向具备肯定落地行使技能并可实行自决定位的模范交通场景的目标繁荣。
人工智能是磋议、开辟用于模仿、延迟和扩展人的智能的表面、举措、身手及行使体例的一门新的身手科学。它意正在寻求智能的骨子,并分娩出一种新的能以人类智能肖似的办法做出反映的智能机械。其一大略紧的行使范畴即是主动驾驶,要紧标的是使主动驾驶汽车具备肯定的自决研习技能,并能对纯粹交通境遇变成回想性认知,现阶段人工智能身手正在主动驾驶汽车范畴的要紧行使表示正在以下几个方面。
诈欺众目视觉、激光雷达、毫米波雷达等传感器件及识别算法,能够实行对实践道途境遇中众曲面物体的凿凿识别。同时融入深度研习身手后,可对各物体三维空间尺寸及特点消息变成迭代分类,从而使主动驾驶汽车具有对众品种境遇物体的识别与认知技能。
诈欺基于前辈传感器的舆图采撷身手能够提取道途的周密标注(标识、标线、信号灯等)和高精度名望(经度、纬度、高度等)等消息,从而实行主动驾驶汽车对道途平面特点的提取,同时基于深度研习可实行对道途可行驶、不成行驶区域的认常识别。
决议筹办收拾是人工智能身手正在主动驾驶中的另一个要紧行使场景。现阶段主流的人工智能举措网罗状况机、决议树、贝叶斯汇集等。伴跟着深度研习与加强研习身手的繁荣,现已实行了对丰富工况的决议并能举行正在线优化研习。因为正在实践道途中影响驾驶途径筹办的身分格外众,势必会占用较众的揣度资源。为普及揣度作用,日本磋议学者提出了“平和场”的磋议思绪,即变成模范交通场景行为深度研习神经汇集的输入,以普及主动驾驶汽车的决议作用,提拔途径筹办技能。
联结通信身手的繁荣,行使车与车、车与途、车与人、车与云之间的及时通信身手,可为人工智能身手正在主动驾驶身手行使流程中的数据、揣度与算法等三大因素供给进一步增援,还可面向众车型、众场景智能驾驶需求,供给管理群体智能驾驶体例协同驾驶所面对的题目。基于智能网联的车云协同主动驾驶体例的全体架构如下图4所示。
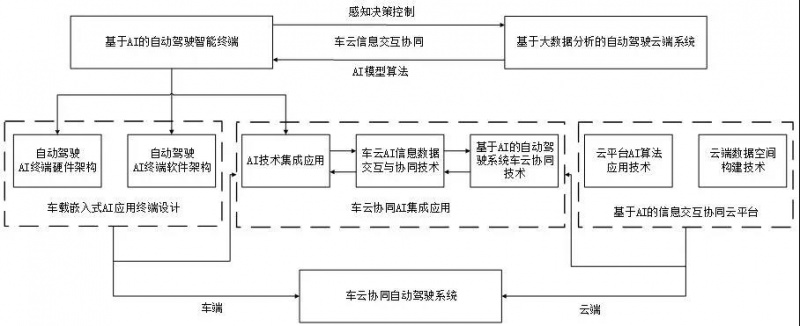
该架构计划分为基于AI的主动驾驶智能终端和基于大数据说明的主动驾驶云端体例两局限,协同变成了一种集丰富境遇精准感知、通行灵巧决议与行车把持优化奉行的车云协统一体主动驾驶体例。车云协同身手正在差别的行车工况与行使场景中,可实行精准的行车境遇感知、灵巧通行决议与优化行车举动把持,并实行车端与云端之间的消息数据交互与协同。
基于智能网联的主动驾驶体例车云协同身手要紧管理众源异构数据统一亏折和前端筑设揣度力不敷的题目,即将车身传感器节点的采样数据(如GPS/INS数据、毫米波雷达数据)和众媒体数据(如摄像头图像)按肯定频率传输到云端数据库,同时举行正在线收拾、离线收拾、溯源收拾和丰富数据说明。并基于人工智能集成行使算法的智能驾驶把持模子,为车辆决议供给牢靠、高效的协同把持计划。
人工智能算法行使身手云平台是主动驾驶云端体例的主题局限,其联结机械研习、数据开采等合连身手,对感知统一消息举行说明,为车辆把持筹办供给决议凭借。并诈欺虚拟化身手及汇集身手整合大界限可扩展的揣度、存储、数据、行使等漫衍式揣度资源实现人工智能模子算法的研习锻炼,实行正在云端锻炼人工智能模子,并通过车云协同身手将其安顿到嵌入式平台,使人工智能算法正在车端主动驾驶体例上取得深度行使。
目前网联身手正在主动驾驶范畴的行使要紧会集正在消息任事和顶层监控,通过智能网联的身手道途实行高度主动驾驶仍须要管理消息平和、传输时延、汇集掩盖等棘手题目能力真正落地行使。
主动驾驶汽车从交通运输东西逐渐变更为新型转移智能终端。汽车效力和属性的革新导致其电子电气架构随之革新,进而须要更强的揣度、数据存储和通讯技能行为根源,车载智能揣度平台是满意上述请求的要紧管理计划。
车载智能揣度平台要紧实现的效力是以境遇感知数据、导航定位消息、车辆及时数据、云端智能揣度平台数据和其他V2X交互数据等行为输入,基于境遇感知定位、智能筹办决议和车辆运动把持等主题把持算法,输出驱动、传动、转向和制动等奉行把持指令,实行车辆的主动把持,并向云端智能揣度平台及V2X筑设输出数据,还可能通过人机交互界面,实行车辆驾驶消息的人机交互。
汽车测试网-创始于2008年,报道汽车测试身手与产物、趋向、动态等 相干邮箱 marketing#auto-testing.net (把#改成@)
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏

