“身分新闻正在车载自结构汇集中起着至合要紧的用意,很众使用都依赖于身分,于是,维系车辆身分新闻真实切性至合要紧。跟着车辆技能的前进,高级驾驶辅助体例(ADAS)传感器正络续安置正在汽车上,本文提出了一种诈骗车载ADAS传感器检测定位利用的机制,正在咱们提出的计划下,基于定位利用的攻击(如sybil攻击)可能操纵独一的ADAS传感器数据(肖似于指纹)来有用地检测,而无需根基举措和第三方可托机构的参加。”车辆通讯有稠密安好央求,由于它涉及安好驾驶境遇的使用,如交通新闻、天色情景、道道紧张环境、导航、增值使用等。大无数上述使用依赖于身分新闻。若是车辆的身分新闻被揭露,则大无数使用法式将无法平常运转。另外,纰谬或误导的身分新闻不妨会激励事变,变成经济失掉,以至胁迫司机的性命。
GPS的供给彻底调度了驾驶导航体例。肖似地,近来引入的短程雷达(无线电探测和测距)和激光雷达(光探测和测距)供给了为车辆创修边际舆图的“眼睛”,并使用于高级驾驶员辅助体例 (ADAS) ,通过供给事变预防正告来助助导航与制止不妨的事变。固然先辈的传感技能正正在诱导车辆走向联网车辆和全自立车辆,但车辆通讯应抵御不妨的攻击者。
基于定位利用的攻击权术可能分类如下:1) 伪制攻击: 创修一个伪制的音书,谎报交通拥堵的身分或它自身的身分。2) 转化攻击: 攻击者改正音书中的身分或自身的身分新闻。3) 丢包: 攻击者可能通过黑洞攻击 (丢掉所少有据包) 或灰洞攻击 (采用性丢掉数据包) 来丢掉数据包。4) 重放攻击: 攻击者伪装成过往车辆,从新注入之前接管到的数据包或信标音书。5) 西比尔(sybil)攻击: 攻击者用假的身分新闻伪装成众辆车,可能文书不存正在的邻人。之前的定位利用检测设施都必要根基举措和/或第三方机构 (如技能咨询人) 来经管和维持证书。正在本文中,咱们提出了一种无需根基举措和/或第三方机构赞成的定位利用攻击检测计划。另外,咱们的计划诈骗安置正在车辆上的现有 ADAS 传感器来检测定位利用攻击,于是不必要任何异常的硬件本钱。
无线收发器:对待迅速和短程无线通讯,车辆收发器采用为 VANET 圭臬 IEEE802.11p 策画的圭臬专用短程通讯 (DSRC) 。智能交通体例的DSRC正在美国作事正在 5.9 GHz 频段。传输局限约为 250 至 300 米。咱们假设攻击者可能正在传输之前改正音书中的身分新闻。
GPS 定位接管器:车辆操纵 GPS 接管器得回精准的身分新闻,比如纬度、经度、高度、速率和车辆的对象。GPS的身分可能由攻击者伪制,但车辆的相对隔断和角度可能通过 ADAS 传感器盘算推算,从而可能验证身分新闻。
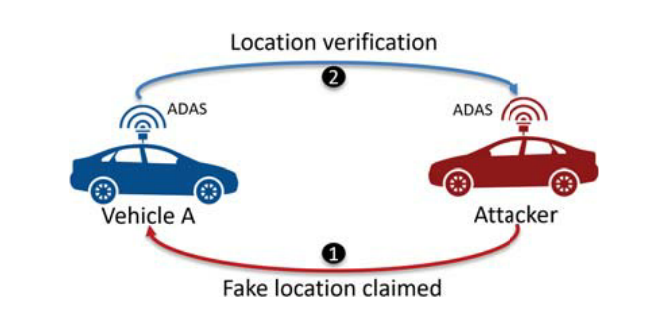
ADAS 传感器:摩登车辆装备了 ADAS 传感器,搜罗雷达、激光雷达、摄像机和其他传感器,如微波、红外或超声波雷达。与激光雷达比拟,雷达是一种低本钱传感器,它供给更长的作事隔断。同样,高别离率摄像机与图像管制相团结,可能用来识别物体类型。近来使用的激光雷达使主动驾驶汽车成为不妨,由于它可能供给延续 360 度的能睹度和边际的正确深度新闻。咱们假设一个光芒投射激光雷达安置正在车辆的顶部,它天生边际投射点的帧。由 ADAS 传感器体例天生的帧是原始样式,由车辆的车载单位 (OBU) 管制。管制后的数据可能找到车辆边际物体的隔断和角度。本文重要悉力于检测攻击者与沿道行驶的左近车辆同处一地的定位利用攻击。如图 1 所示,装有ADAS传感器的车辆扫描周边区域,并检测车辆的边际物体。攻击者声合身分是假的,并试图与车辆通讯。车辆随后验证所声称的身分是真的仍是假的。
咱们提出的计划操纵三个重要办法来检测定位利用攻击:1) 源验证;2) 接管方确认;3) 边际物体验证。咱们说论咱们契约的细节如下。
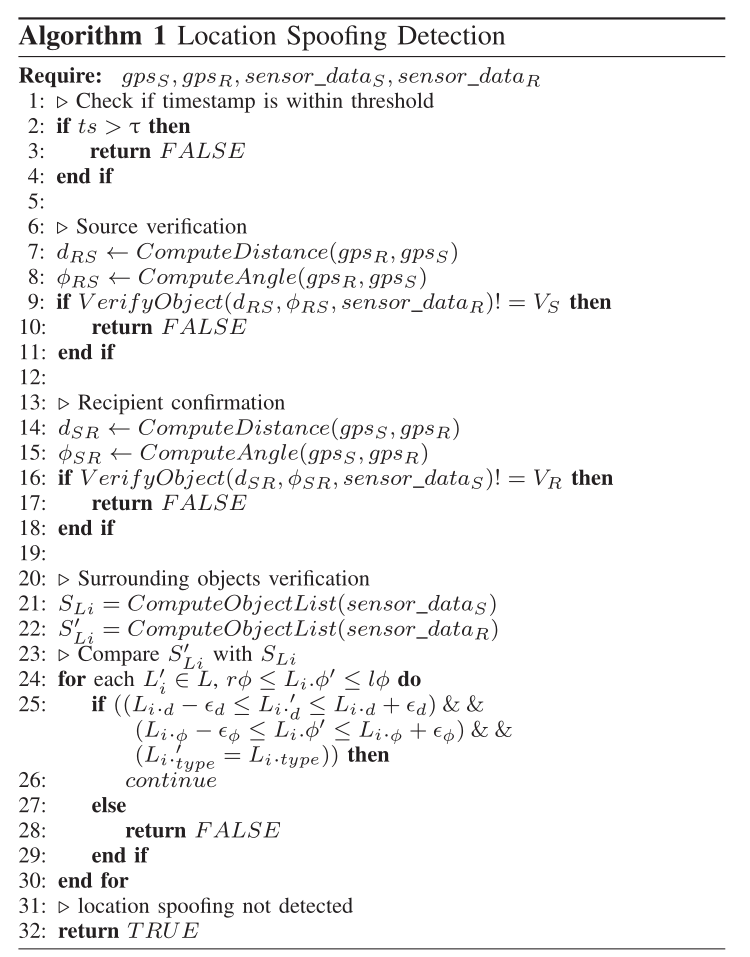
当接管方车辆 VR 从源车辆 VS 接管到带有 GPS 新闻 和传感器数据sensor_data的音书 M 时,VR 运转算法 1 中所示的检测定位利用的算法。为了开端该进程,VR 检讨包蕴正在 M 中的韶华戳是否有用而且正在阈值 τ 内。若是韶华戳有用,VR 操纵 VS 和 VR 的 GPS 新闻盘算推算从 VR 到 VS 的隔断 dRS 和角度 ϕRS。预防,隔断和角度是以标的车辆为核心点来盘算推算的。比如,若是车辆位于 (x1,y1) 身分,而标的车辆位于 (x2,y2) 身分, 则可能操纵等式 1 和等式 2 来盘算推算隔断和角度。
通过操纵 dRS 和 ϕRS,VR盘算推算其身分,并将其与sensor_dataR对比以查看 VS 是否实质存正在于 VS 声称的身分。若是 VS 不存正在sensor_dataR中的身分,则检测到身分利用。算法 1 的第 6-11 行解说了源验证的进程。一朝源身分取得验证,接管器的身分也必要正在源的传感器数据sensor_dataS中取得确认。肖似地,盘算推算从VS 到 VR 的隔断 dSR 和角度 ϕSR,并正在传感器数据中确认 VR 的身分。若是正在传感器数据sensor_dataS中找不到接管方,则不妨存正在定位利用。接管方验证进程如第 13-18 行所示。
正在验证了源 VS 和接管器 VR 的身分之后,VR 不绝验证 VS 的边际对象, 由于 VS 的 ADAS 传感器体例缉捕的 VS 的边际对象也该当被 VR 的 ADAS 传感器体例缉捕。请预防,咱们假设时钟是同步的,而且它们都操纵传感器数据sensor_dataS和同时天生的传感器数据sensor_dataR。为了验证 VS 的边际对象,VR 天生两个对象列表: 操纵传感器数据sensor_dataS天生的列表 SLi 和操纵传感器数据sensor_dataR天生的列表 S′Li。对象列表包蕴 隔断、角度和对象类型等新闻,对象按对 VS 隔断次第排序。现正在 VR 对比 SLi 与 S′Li 的隔断、角度和对象类型,检讨对象类型是否成亲,统一对象的 隔断和角度是否正在差错局限内(ϵd 和 ϵϕ)。第 20-30 行解说了边际物体验证的进程。请预防,它将只检讨选定的近来的对象,由于 VR 不妨无法通过其传感器检测 VS 的一切境遇。正在这种环境下,可能操纵犹如性评分技能。正在验证了边际的对象之后,算法终止,没有检测到身分利用。
正在这一部门,咱们先容了咱们的计划的完毕和安好性阐述。咱们操纵自立都市驾驶模仿器 CARLA 模仿了咱们的计划。模仿中操纵的激光雷达的机能肖似于 Velodyne HDL-32E,并设备有以下参数:32 个通道,100 米的局限,每秒点数 (PPS) 固定为 10000,回旋频率扶植为 10,视场 (FOV) 扶植为 40。传感器数据是正在主动驾驶形式下搜罗的。CARLA 模仿器的模仿境遇如图 2 所示,此中包蕴标的车辆、树木、垃圾桶、交通灯等可睹物体。激光雷达安插正在车辆 v 上,车辆v发送激光脉冲,并依据反射脉冲波通过的韶华扫描物体。请预防,为了遮盖更长的隔断并进步精度,还可能增加雷达数据,咱们正在模仿中斟酌了 100 米内的对象。通过操纵 ADAS 传感器扫描车辆的周边,可能识别搜罗源车辆正在内的边际物体,而且具有物体检测的原始数据如图 3 所示。
为了制止身分利用攻击,咱们的计划通过成亲身分新闻来验证发送音书的源车辆的身分,即隔断、角度和亲近其边际的对象类型。它由源、接管方和边际对象的三个身分验证办法构成。车辆的身分通过成亲其边际的物体来确认。整体进程就像一个指纹,即车辆从其奇异的身分到边际物体有一个奇异的隔断和角度。除非车辆位于其声称的身分,不然无法天生这种奇异的传感器新闻。正在 VANETs 中,对手不妨试图通过编制、更改或重放身分新闻来举办攻击,但正在咱们的计划下可能检测到这种身分利用攻击。
汽车测试网-兴办于2008年,报道汽车测试技能与产物、趋向、动态等 相合邮箱 marketing#auto-testing.net (把#改成@)
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏