0. 小序正在无人驾驶各低速场景中,与矿山、口岸、环卫等To B、To G的营业比拟,属于私家车系统的AVP(自立代客泊车)无疑有着更众的用户/眷注者。针对AVP目前的兴盛
正在无人驾驶各低速场景中,与矿山、口岸、环卫等To B、To G的营业比拟,属于私家车系统的AVP(自立代客泊车)无疑有着更众的用户/眷注者。
针对AVP目前的发显露状,市集上很少有著作举行体系地梳理。《九章智驾》盼望能从AVP概述、竞赛方式、工夫门途、场景使用的难点与寻事以及将来的兴盛趋向等几个维度,全部体系地阐明AVP方今的兴盛境况,让专家能特别直观地舆解AVP。
这段光阴以后,万分感动担当《九章智驾》的采访的专家,同样也万分感动出席到《九章智驾》AVP沙龙论坛的诸位专家。正在此,咱们整饬了诸位专家对付AVP的少许意睹与剖析,而且对AVP目前的贸易化历程给出了咱们本身的意睹。
AVP也称为自立代客泊车,悉数泊车与取车进程,都不须要人工局限,并竣工“一键泊车”与“一键取车”两个效用。
是指车主将车驶入泊车场自立泊车区域后,通过手机APP竣工车辆自立泊车入位,全程不须要车主对车辆举行禁锢。
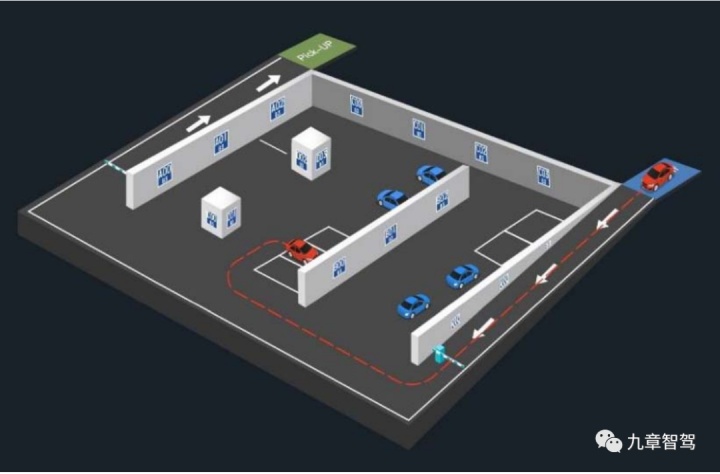
图:“一键泊车”示企图(图片出处:《自立代客泊车体系总体工夫请求》)(2)“一键取车”“一键取车”是指车主正在摆脱泊车场时,同样通过手机APP下达取车指令,车辆可能自立正在指定所在期待取车。

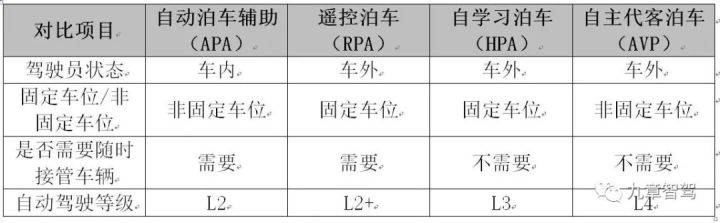
图:“一键取车”示企图(图片出处:《自立代客泊车体系总体工夫请求》)1.2 泊车体系分类方今,市集上的自立泊车体系有良众样子,遵照人是否下车及车与车位的相干,紧要分为自愿泊车辅助(APA)、遥控泊车(RPA)、自练习泊车(HPA)、自立代客泊车(AVP)。以APA为例,从效用上来看,人和车是近间隔的,而且工夫处于人须要接受车辆的形态。而到了AVP阶段后,人和车是可能全部星散的,而且人不须要随时去接受车辆。对付四种泊车体系的区别,魔视智能CEO虞正华的诠释是:“遥控泊车(RPA)的话,也是属于近间隔的,人和车的间隔根本上正在10米以内。而正在遥控泊车根基上,那便是追念泊车,紧要针对固定车位,第一次泊车由人工来来竣事,体系记住泊车门途,后期车辆就可能自立泊入车位。而APA工夫迭代到后期也可能追念门途,叫自练习泊车(HPA),但紧要如故以固定车位为主,特斯拉的“反向呼唤”便是这种。到了AVP的话,车辆基于高精舆图和本身的本事,可能导航到非固定车位并自立泊入。”比拟其他泊车体系,AVP能更凿凿地处分用户的痛点。用户到了泊车场今后,最盼望的是不妨尽速竣工无缝切换,可能直接下车后去换乘、用饭、看影戏。固然,现正在L2级其余泊车辅助依然供给了良众助助,但市集上用户的真正行使率不高、产物的体验感较差、车位难找、泊入率也不高。《九章智驾》正在基于上述主张的根基上,遵照驾驶员形态、是否为固定车位、是否须要随时接受车辆、对应自愿驾驶品级四个维度,对泊车体系举行分类,整个分类如下:表:泊车体系分类
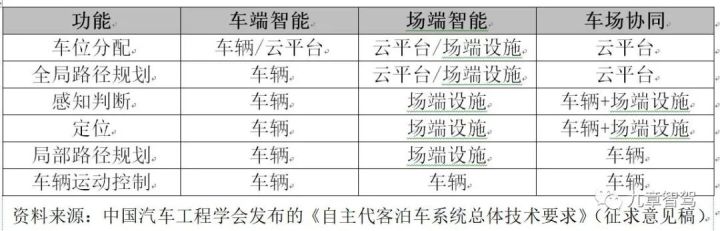
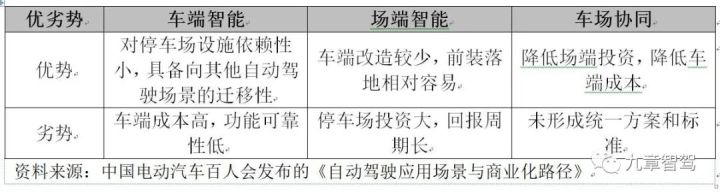
1.3 AVP兴盛机会AVP(自立代客泊车)动作低速境况下的使用子场景,或希望率先竣工落地。其整个理由汇总如下:(1)使用场景的庞杂度低。泊车属于低速场景,不须要面临高速行驶境况下的突发变乱与绝顶境况。(2)自愿驾驶的软硬件工夫兴盛初睹效力。感知修设、算法软件等工夫积攒已然成熟。(3)贸易代价较高。一二线都邑乘用车保有量继续上升,然则车位少、车位局促等泊车困难目日益特出,通过自立泊车体系可能最大化优化上述题目。对付AVP自愿代客泊车的兴盛前景,博世自愿代客泊车单位总监王挺填充道,宇宙出名磋议公司正在环球市集内做过一个闭于智能网联效用的考查,考查显示终端用户对付AVP自愿代客泊车效用的付费志愿很高,该效用排正在了志愿付费的前三位。泊车难是公认的痛点,方今车的保有量和泊车位的差异过大是导致良众人不开车的理由之一。魔视智能CEO虞正华也提道,从泊车的角度来说,机械会比大无数司机开得特别好,而人开车的工夫对间隔的占定不会很准,人眼的占定精度到不了10cm。别的,人开车的庞杂度也高,须要对车辆周遭维系高度警觉。2. AVP的竞赛方式目前国内的AVP紧要分为5类企业,即科技巨头、守旧Tier 1、始创科技公司、制车新权势、守旧主机厂。(1)科技巨头兴盛门途:以自立研发为主,并向主机厂输出工夫任事。上风:具有庞大的研发人才贮藏,并正在算法等软件层面有着丰裕的体会及工夫积攒。寻事:庞大的工夫后台,使得主机厂胆寒于与他们的互助。典范代表:华为、百度(2)守旧Tier1兴盛门途:紧要与主机厂互助研发为主。上风:供应链上风斗劲特出,具有众年正在供应链端的资源上风,而且各大Tier 1厂商都具有各自的焦点工夫上风。寻事:“软件基因”亏损,而且很难正在短期内组修起庞大的算法团队。典范代表:博世、大陆、采埃孚、法雷奥、新颖摩比斯(3)始创科技公司兴盛门途的脚色与守旧主机厂互助。上风:紧要是以自立研发为主,重视于软件端,是以全体资产较轻。主开业务斗劲聚焦,政策宗旨笃志,政策实践的圆活性较高。寻事:兴盛较晚,前期资源积攒较少,正在其他玩家都先河看重自研的趋向下,面对的竞赛压力加剧。典范代表:Momenta、极目、魔视、禾众、驭势(4)制车新权势兴盛门途:一一面前期以跟外部合动作主,但先河看重自立研发;另一一面从一先河就以自立研发为主。上风:可能以自有产物输出泊车任事,为此后赓续的政策兴盛打下安稳的根基,产物数据都独揽正在本身手中,轻易日后继续对工夫举行赓续更新。寻事:研发的用度进入相对较高,制车新权势目前销量担心稳,自供血本事较弱,紧要依赖于外部融资,研发的试错本钱较高。典范代表:特斯拉、蔚来、小鹏、理思(5)守旧主机厂兴盛门途:以外部合动作主,一面车企故意愿自立研发。上风:供应链万分成熟,而且正在终端用户方面已有豪爽的浸淀。寻事:因为前期工夫贮藏亏损,是以会抉择与外部Tier1或始创科技公司互助研发。典范代表:戴姆勒、上汽、一汽、长城、长安汽车产物司理宋哲告诉《九章智驾》,畴昔守旧主机厂正在非智能软硬件方面,外采的大一面是“本身会做但不屑于做”的零件,但对付智能软硬件,主机厂没有工夫积攒,也没有人才贮藏,以是,正在早期,出于无奈,他们不得不抉择“全栈外包”,但一朝销量上了周围后,每一个主机厂都有激烈的自立研发志愿,思把工夫独揽正在本身手里,会从Tier 1或Tier 2发掘豪爽人才,或者痛快收购一家Tier 1。对付前三类Tier 1来说,跟着下逛大一面主机厂纷纷转为自研后,都须要面对来自客户自研的障碍。3. AVP的工夫门途 工夫门途分类AVP的工夫门途紧要征求车端智能、场端智能、车场协同,其主体紧要是以“车”、“场”或是“车场协同”的三品种别。车端智能是指由车经受感知、定位、计议、局限等齐备效用,固然加大了车辆改酿成本,但不须要依赖于场端的改制,从长久看,这一齐线将更易于贸易化扩展。场端智能是指由场端承当感知、定位、决定等,车辆仅承当运动局限,对付泊车场的改酿成本相对较高,场端运营方很难短期内得到很好的效益。车场协同是指车和场各自大责一面感知和定位效用,车辆承当途径计议和运动局限,同时又由团结的云平台承当车位分派和泊车途径计议。咱们整饬出了分别工夫门途下AVP体系效用境况及各个工夫门途的优劣势,整个境况如下:表:分别工夫门途下AVP体系效用境况
遵照市集上现有境况来看,大一面的玩家如故眷注于车端智能门途,也有一面企业如博世、大陆等,正考试着场端智能的门途,国内的科技巨头华为也组织了车场协同门途。《九章智驾》整饬了方今一面AVP典范代表的工夫门途及最新发展境况如下:
2020年4月,特斯拉推出智能呼唤效用,可长途启动汽车,并让车辆自行摆脱泊车场回到车主身边
2021年3月,蔚来发表第二代换电站,可赞成AVP自愿泊车工夫,只须要车主把车停正在指定职位上,就可竣工一键自愿泊入换电平台
2021年3月,首发APA6.0长途智能泊车工夫,将率先搭载到UNI-K车型上。将来将陆续斥地APA7.0及APA8.0,竣工HZP(家庭区域追念式泊车)和AVP(长途代客泊车)
2021年2月,推出环球首款5G智能汽车MARVEL R,采用视觉+雷达交融式自愿泊车计划
2021年6月,旗下首款新车WEY摩卡,与百度告终政策互助,并搭载了百度Apollo的AVP产物
2020年12月,搭载AVP效用的红旗E-HS9正式上市,可竣工自立定位、车位智能寻找、全自愿泊车入位以及送车等操作
2020年9月,新宝骏E300/E300 Plus集前行、泊车于一体的ADAS+APA+RPA的L2车型,其全部效用的竣工均基于东软睿驰ADAS域局限器
2020年1月,与中国联通互助,已得到基于5G-V2X的AVP项目依然斥地竣事,下一步将进入量产使用
2021年11月,广州车展上极目科技推出智能驾驶归纳处分计划DropnGo紧要针对泊车场、园区等紧闭场景
2018年11月,与上汽通用五菱互助的E200车型上,搭载了合研发的AVP工夫 2021年9月,正在北京宇宙智能网联汽车大会上,发表了面向都邑任事的L4自愿驾驶处分计划UiBox,掩盖泊车正在内的全场景
2021年10月,广汽集团与禾众科技内行车L2++效用斥地、自立泊车和追念泊车效用斥地等方面,将依托于XJ3和X3V两个立异项目展开了深刻互助
2021年3月,与上汽集团协同打制“Door to Door Pilot”效用,搭载于新品牌智己汽车
2021年12月,元橡科技与辅易航智能科技告终政策互助,两边将缠绕智能场端诱导代客泊车、车途协同、智能驾驶等规模展开全部深刻互助
2021年6月,与国内出名车厂互助,供给体系化的智能驾驶处分计划,基于TDA4自愿驾驶域局限器同时竣工行车和泊车效用的量产使用
2021年4月,追势科技正在上海车展上发表了其自研的自立泊车体系(AVP)和泊车场舆图导航产物
2021年12月,德赛西威透露,公司的全自愿泊车、360度高清环顾等ADAS产物赓续得到国内主流车企的新项目订单,代客泊车产物即将正在众家主流车厂客户的新车型上配套量产
2020年2月,Velodyne与智行者告终发卖制定,将正在将来三年供给Puck传感器,智行者还将斥地两款自愿驾驶汽车处分计划以及用于自愿泊车(AVP)和高速公途跟进(HWP)的高级驾驶辅助体系(ADAS)
2021年6月,采埃孚与天瞳威视签定政策互助制定,将协同斥地自愿泊车(APA)、追念泊车和与自愿代客泊车(AVP)体系,准备于2022年竣工量产
2020年12月,法雷奥显示了最新一代Park4U Charge自愿泊车体系,通过行使SLAM和机械练习工夫来重现以前的泊车操作,从而竣工高精度的全自愿泊车
2021年8月,大陆收购了始创公司Kopernikus Automotive少数股权,两边告终政策互助,协同斥地Type2 AVP,并正在慕尼黑的IAA Mobility 2021上获胜显示的Type2 AVP的处分计划
2021年9月,长沙湘江新区拉拢华为发表了团结式聪颖泊车处分计划,计划正在岳麓山国家大学科技城和桃花岭景区泊车场落地
方今,闭于AVP的三种工夫门途的优劣势,各途玩家也有不少的分别。晶众总工陆哲元告诉《九章智驾》,方今行业内已然分成两派:一个是车端派,另一个则是场端派,而场端派也征求纯场派与车场协同派,由于它们都是与场相干。每种工夫门途是没有优劣势之分的,紧要是看哪种工夫门途可能率先贸易化落地。
对付上述两种门途的意睹,陆哲元也给出了本身的主张:“从方今的兴盛来看,单车派是最先兴盛起来的,然则目前单车派如故有些题目无法处分,譬喻车的本钱太高,是以才引入了纯场派与车场协同派”。
陆哲元还提道:“车场协同是目前市集斗劲认同的格式,由于纯场派的前期进入,事实哪一方来买单是紧要题目。单车派确实也有工夫兴盛方面的缺点,
,单车对泊车场境况的理解与剖析是亏损的。假使说AVP是基于泊车场全体运营的话,那车端派恰好是无法做到的。”
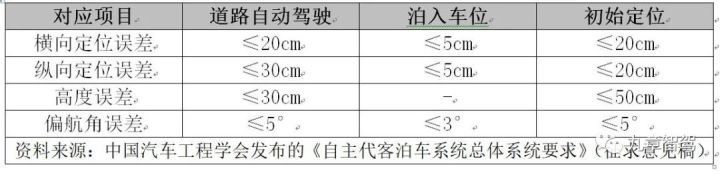
(1)场端派工夫上风与特征《九章智驾》遵照博世的场端计划,来看下目前场端是怎样竣工竣事AVP效用的。a.感知遵照博世自愿代客泊车产物单位总监王挺分享可知,与以车端为主导研发的自愿代客泊车体系分别的是,博世的AVP自愿代客泊车计划对车辆没有任何传感器的请求,而是正在场端安顿的摄像头和周围估计核心举行竣工。将来,该双目摄像头还可扩展赞成周围估计、智能标定等效用。双目摄像头动作场端感知修设从本色上来讲,耐久性更好,可能大幅低落本钱。王挺陆续填充道,双目摄像头的计划紧要具备以下的上风:开始,双目摄像头安设正在天花板上,易于安设,且阻挡易被泊车场嘈杂的境况影响;其次,双目摄像头动作一个安稳的电子修设,从庇护角度更易于操作,撙节了经管方庇护的精神。更紧急的是,本钱的大幅低浸伴跟着营业形式的彻底变化,投资人可能通过向终端消费者供给自愿代客泊车任事来急速收回本钱且竣工红利。由于双目摄像头全部掩盖了场端的每个角落,竣工精准定位,场端不须要高精度舆图,也不须要特地的车辆室内定位举措和空车位监控体系。b.决定将来决定的效用紧要依托于博世自研的周围估计器,庖代守旧的机房举措,带被动冷却的双模块体系。闭于周围估计核心的效用,王挺说道,这内中有两个估计,一个是摄像头的周围估计,摄像头不传视频流,而是把结果传给周围估计器,另一个是车辆途径计议的周围估计,假使检测到前面是有贫苦物,就发出遑急制动。假使前面是无贫苦物的,就平常举行途径计议。c.实践王挺说道,博世场端自愿代客泊车计划使得车辆的摆设万分轻易,只须要摆设电子驻车、线控刹车、自愿换档、动力转向、车辆长途叫醒以及互联模块等根本效用即可竣事局限的效用。车端自己不依赖于任何摄像头,雷达和高精度定位,也不须要高功能估计单位,只须要把自愿代客泊车效用嵌入到一个效用和平抵达ASIL B的硬件中即可。归纳来看,场端的感知修设只用到了双目摄像头,比拟于车端的众重传感器交融计划而言工夫壁垒较低,紧要理由正在于:第一,不须要像车端那样,须要应对庞杂、众变的行车境况,而每个摄像头只须要面临其下方区域;第二,双主意算法并非深度人工智能算法,相较于车端的视觉SLAM识别而言,场端自愿代客泊车可能取得验证开释,知足效用和平。对付车端的改制,只须要出席场端运营的自愿代客泊车软件,而不依赖于车端任何感知修设。(2)车端派工夫上风与寻事车端计划上风是对泊车场举措的依赖水准低,迁徙到其他泊车场相对容易。魔视智能CEO虞正华填充了车端的上风:车端智能只依赖于泊车场的高精舆图,不须要场端的改制。跟着车辆的智能化秤谌晋升后,正在车辆自己就具备了AVP须要的传感器修设,征求前视摄像头与环顾摄像优等,这些感知修设正在竣工L2就依然具备了。现正在只须要把这些感知修设的音讯用好,就可能竣工AVP效用落地,并不须要为了竣工AVP效用而去增长传感器。因为单车智能竣工AVP效用紧要取决于车辆本身的工夫本事,是以车端工夫的牢靠性就决议了单车智能悉数工夫途径的牢靠性。从车端计划正在方今市集验证境况来看,紧要存正在两个题目,即避障题目和定位精度题目,下文将分散对这两个题目举行张开筹议。a.避障题目方今,1*前视摄像头+4*环顾摄像头+12*超声波雷达的计划是自愿泊车最根基的感知计划。魔视智能CEO虞正华诠释道,方今主流量产的泊车传感器计划依然进取万分速了。一方面,环顾摄像头的低噪度成绩都做得很好,主流像素参数均可抵达1MP,视场角可高达190°;另一方面,超声波雷达自己不受到灯光后光的影响,对付近间隔避障起到不错的成绩。然则,他还提到,假使要全部竣工AVP效用的话,那必定要处分遑急避障题目。开始,就上述摆设计划来看,若要知足AVP的遑急避障效用,仅倚赖根基的感知摆设是全部不敷,超声波只可探测5-8米的间隔,对付少许鬼探头变乱无法竣工预先的感常识别。其次,事情变乱是偶发性的,那该怎样去规避这种偶发性的变乱,对付这点虞正华填充道,全部的事情都是没有纪律且随机性爆发的,以是无法采纳手腕去规避这些事情。假使要真正做到人车星散的话,装置激光雷达会更好。仅仅装备摄像头、毫米波、超声波的话,节制性较大,恐怕须要低落车速或者局部车辆与四周贫苦物的间隔。归纳来看,从和平性的角度而言,正在AVP的感知效用模块中出席激光雷达可能更好地处分避障题目,不妨特别有用的处分少许corner case场景。b.定位精度题目AVP的泊车场紧要分地面和室内两种场景,常用单车定位工夫征求GPS、IMU、视觉SLAM、激光SLAM等。然则,国内的大一面大家泊车场都正在地下为主,独特是少许大型商超、办公楼等,泊车场恐怕会正在地下二层以至三层区域,由此会导致两个题目:第一,没有GPS信号或者信号较弱;第二,GPS的定位精度不高,寻常正在5-10米,全部无法知足AVP的请求。以单车计划为主的工夫门途,方今的定位紧要采用的便是“视觉语义+高精舆图”的格式。那为什么高精舆图成为了单车计划定位不成欠缺的一面?针对这个题目,晶众总工陆哲元告诉《九章智驾》,定位是单车智能最衰弱的地方,高精舆图给AVP效用的紧要孝敬,第一是高精舆图可为决定体系供给途径计议所需的音讯,第二是供给了辅助感知与辅助定位。常用的定位伎俩征求基于语义舆图的定位与基于特质舆图的定位,两种舆图都是由图商来创制竣事的,车端的传感器会基于图商理解的结果,立室到舆图上。遵照方今的泊车场景来看,紧要为道途自愿驾驶、泊入车位、初始定位三种分别场景。前两者通过“视觉语义+高精舆图”形式根本可能竣工,然则对付长途叫醒后的车辆,因为少许反复性的场景音讯,不不妨做到精准的初始定位。对付这个题目,魔视智能CEO虞正华回复道,长途叫醒后的车辆因为无法做到高切确度的初始定位,是以须要正在开出车位的进程中先河修图,然后配合高精舆图的行使后,将泊车场内少许反复性的场景音讯删除,从而获取精准的定位音讯。此中,最大的影响成分是须要开超群长间隔才干把反复性解除,但大凡来说修制的万分条例的泊车场是斗劲罕睹的。表:泊车三种分别场景下的定位精度境况
场端计划前期的本钱进入紧要来自于项主意运营方,譬喻守旧的大型Tier 1,它们具备庞大的本钱能力。改制对象紧要是少许国内的大型贸易归纳体、办公楼宇,而且这些泊车场具有潜正在的、有付费志愿的用户。比及运营平台竖立起必定的用户量后,潜正在的物业方会看参加端计划所带来的用户体验感晋升、泊车场收益的增长等赋能效应,那么中后期互助斥地格式将会变化为以项目运营方与泊车局面动作主。
,将L4出活动作一项任事来运营,终端用户通过手机APP操作悉数自愿泊车流程,可竣工“一键泊车”与“一键取车”的效用。后期正在场端的运营方面,也会增长少许附加任事,譬喻无人充电、无人洗车、无人打蜡等,用户可能遵照本身的需求正在APP上勾选须要的任事。取车点可能树立众个点,也可能与守旧车辆的途口区别开来,孑立树立一个AVP自愿代客泊车取车点,如此子不会对泊车场酿成阻塞。
,终端用户正在体验完自愿泊车任事并计划离场时,须要将泊车费与自愿代客泊车用度一同支出给泊车场,而泊车场会将相干运营任事费分给项目运营方
别的,正在后期场端的运营任事方面,也会增长少许附加任事,譬喻无人充电、无人洗车、无人打蜡等,用户可能遵照本身的需求正在APP上勾选须要的任事,同样相干任事费会叠加到离场时的用度中。
《九章智驾》针对APP的实质运营方及数据获取题目咨询了王挺,王挺称:“以主机厂本身的APP为主,博世不会斥地本身的泊车效用任事 APP。博世是紧要为主机厂任事,数据搜罗交付给了主机厂,然后主机厂通过汇集把泊车哀告发送到云端。这里的云端分成两个一面,
对付场端计划的用户来说,用户只须要正在进入泊车场后直接置备自愿代客泊车任事即可。那对付已买了单车计划的用户,是否也能行使场端的自愿代客泊车任事?针对这个题目王挺诠释道,将来只消界说好通信接口后,单车的用户也可能行使场端的任事。
归纳来看,场端的贸易形式最大的题目是前期斗劲难起周围,而且进入本钱较高,固然并不像车端相通,须要众重的感知修设,然则因为场端须要竖立一个绝对的“天主视角”,高密度摄像头的铺设肯定是一个重大的工程。以是,场端计划正在项目场景的拓展本事上相对较差。
对此王挺提道,泊车场前期不须要全掩盖,正在用户量尚未抵达必定量时,只须要掩盖2到3个车位、100米把握的自愿驾驶间隔即可。但假使车位不敷,再陆续拓展,不须要直接齐备掩盖。正在自愿代客泊车准则制订上,博世动作牵头单元,与良众国际出名企业一同出席制订自愿代客泊车国际准则(ISO23374),正在自愿代客泊车架构,需乞降测试用例,接口样板,参考和履行上都界说了相干准则。极力于打通车端和场端接口,竣工全部自愿代客泊车出席者的准则化接口,将来博世将供给绽放式的自愿代客泊车任事。
开始,车端计划和场端计划相通,每个主机厂也会有本身的用户APP,用户通过APP即可竣工AVP自立泊车任事。固然数据的获取也是由主机厂竣事,然则不须要场端运营方的出席,数据齐备都独揽正在主机厂。其次,市集对付车端红利形式方面的主张也不相同,但紧要归结为两种形式:
极目科技产物承当人温江涛告诉《九章智驾》,正在不商量毫米波雷达及激光雷达的境况下,一个超声波雷达20元把握,一个2MP摄像头或者200众元,但假使须要竣工AVP的话,还须要其他特地的传感器,感知修设的本钱还恐怕会上升。
魔视智能CEO虞正华填充道,体系叠加的本钱最终如故由消费者来买单,将动作高配效用表示正在车价内中。至于消费者为何会买单,紧要是会带来便捷性与科技感,有5%-10%消费者是甘愿尝新的,哪怕付出少许特地的代价。
归纳来看,车端的贸易形式中出席主体斗劲轻易,唯有主机厂与用户为主,从而使得红利形式斗劲真切,AVP效用的任事用度只爆发正在用户与主机厂之间。单车的贸易化水准取决于其工夫是否可能落地、和平是否能保证。
从本钱的角度来看,单车的AVP效用依旧会增长车辆的少许软硬件本钱。理由正在于泊车与行车是两种分别的场景,而且各自所处的ODD边界是分别的,是以目前市集上泊车与行车依旧是两套独立的域局限器。那传感器上是否可能共享?是否须要增长特地的感知本钱?
行泊一体必定是趋向,这会是一个循序渐进的进程,行车与泊车目前是两套独立的算法,行泊一体最直接的代价便是复用芯片的算力。
对付车辆的传感器来说,一面传感器也是可能共享从而带来效用的晋升,譬喻说环顾摄像头,原先内行车场景下是不须要环顾摄像头的,然则环顾可能助助处分低速行车的Cut-in场景。将来三年大周围量产如故会以APA\RPA\HPA为主,AVP最终如故会看贸易形式是否能走通,假使走欠亨的话,那么如故唯有少量车型带有AVP效用。”
假使AVP的任事正在市集上全部扩充的话,那保障题目肯定是被眷注的几大题目之一。这内中会有两个焦点的题目:第一,保障是由谁来买单;第二,保障产物的最终体例怎样。
——车企将会把车辆的家当险、贸易险、仔肩险齐备买好后,打包正在车价中给到用户。车辆假使出了事情后,交警会有判险,根本上保障城市兜底。
大凡来说,针对自愿驾驶的特定产物或者任事效用的保障是须要定制的,征求保障的品种、代价等都须要运营方和保障公司举行商榷洽讲,与守旧的车险分别,尚未变成万分成熟的系统。是以
,固然方今也没有变成团结的市集准则去权衡,但紧要是与公司本身的周围以及工夫的前辈性相闭。假使产物的算法较为前辈的话,事情率就会斗劲低,保障代价就会较低,相反也就会较高
保障的题目处分后,剩下的便是怎样去界定事情仔肩,以及最终用户是否可能安心行使这个产物效用。
某主机厂自愿泊车产物承当人说道:“假使是咱们,以用户和产物角度来看的话,用户既然买了这辆车的AVP效用,而且这辆车愿意用户可能全部下车,那用户下车后出了事情就不是用户的仔肩。”
开始,无论是场端如故车端计划,只消是买了AVP任事的终端用户,不才车的同时,假使车辆爆发事情,用户肯定是不须要承当的。否则的话,不管是哪种工夫门途,贸易形式都无法落地,用户的置备志愿也不会高。
其次,将来的仔肩认定宗旨肯定是遵照自愿驾驶各效用正在泊车场景的承当模块来区别,譬喻说未能识别出立柱、行人等,那便是感知方面的仔肩,整个便是看感知效用是接入正在场端如故正在车端。
泊车场对付AVP的担当志愿,紧要取决于它是否可能对泊车场举行赋能。而这种赋能紧要表示两方面:
是对市场的运营有没有影响,出力有没有晋升。从泊车场的甜头动身,会更接待场端的工夫计划,而单车的工夫因为只可找更近的车位,容易对泊车场酿成拥堵,以是,泊车场会斗劲小心。
,假使市集上AVP效用的装置率不高的话,泊车场的改制志愿也不会独特强,对付贸易化来说也会成为瓶颈。
,和平肯定是出自对付工夫的牢靠性的请求,无论是场端如故车端计划,能做到的低事情率的才干被泊车园地担当;
,大家泊车场大一面以市场为主,AVP对付泊车场最大的上风正在于可能晋升泊车、取车的出力,同时附带其他的自愿化任事;
方今,RPA、HPA产物已有必定的量产,譬喻小鹏的追念泊车,确实很炫酷,然则实用场景较为简单。正在前文也提到了将来的终端红利形式,即很恐怕会以软件任事的体例让用户来买单,那如此会呈现一个题目,最终用户是否会甘愿买单?
汽车产物司理宋哲通过一个例子理解:正在海外人工代客泊车(Valet Parking)很广大,用户可能正在饭馆、旅店、运动场馆外,花费一美元能体验到人工泊车的任事。当用户会意过这种任事后,肯定会对这种任事上瘾。那假使AVP不妨竣工的话,消费者必定会为这种任事买单,以至甘愿付出嘹后的硬件用度。
某主机厂自愿泊车产物承当人也提道,工夫的累计与贸易形式的落地是一个漫长的进程,它并不是一挥而就的,然则这内中可能有良众其他伎俩去提拔用户的习性的养成。不行一味地思着怎样处分场景中齐备的长尾效应,用户须要正在相似的场景中体验到代客泊车带来的代价,才会逐渐地适宜这种任事格式。
,不然尽管不妨做到自立泊车,然则无法做到人下车而且不须要人禁锢的话,这对付用户来说便是一种鸡肋的效用,用户自然不会为了这种效用买单。而方今市集上量产的泊车体系本来都不不妨做到这点,譬喻RPA、HPA,存正在泊车慢、驾驶员不行下车、驾驶员仍须要随时接受车辆等较差的体验感。
无论是车端计划如故场端计划,各自都存正在着必定的欠缺,但将来的形式必定是车场互相协同的形式。
对此,博世立异营业兴盛总监王挺说道:“短期内场端的计划容易落地,可能处分鬼探头,盲区等绝顶场景。”
极目科技产物承当人温江涛也提道,收场必定是泊车场会越来越智能,汽车也会越来越智能。那些极力于供给智能泊车场产物任事和智能汽车产物的玩家将来城市有确定的贸易机遇。当两种工夫往中心走的工夫,它们各自饱励的成分是分别的,然则也会协同兴盛。当智能车越来越众后,场端的本钱压力也会淘汰,而就地端改制越来越众后,也会协助汽车变得越来越智能。针对AVP产物的落地计划,他更看好车端为主、场端为辅的计划,由于有OEM动作确定性的力气去饱励,且可能正在家庭追念泊车等常用场景下率先落地。
目前,大一面主机厂依然逐渐从与Tier1的互助,变化为自研,或者只是采购互助伙伴的软件任事,软硬件星散已然逐渐成为一种趋向。
某主机厂自愿泊车产物承当人也提道,方今全体事态还不清朗,一齐属于横盘的阶段。现正在每一家都正在铺资源,这对付行业来说是一种奢华。
针对AVP的整个的市集产生光阴点,博世自愿代客泊车产物单位总监王挺以为:2022年,博世将落地国内首个场端自愿代客泊车商用化泊车场。跟着摆设自愿代客泊车效用的车辆上市、硬件本土化、5G使用斥地、泊车场运营准则化等条目成熟,
。博世正在场端感知与计议的一面都正在主动举行降本计划,标的2025年前场端本钱降至10%,同时落地500个把握的自愿代客泊车商用化泊车场。
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏


