“安静第一”是主动驾驶的核情绪念和价格观。主动驾驶车辆的合座编制安静安排是一项庞大的编制工程, 涉及车载主动驾驶编制的核默算法政策安排、 硬件和软件冗余
“安静第一”是主动驾驶的核情绪念和价格观。主动驾驶车辆的合座编制安静安排是一项庞大的编制工程, 涉及车载主动驾驶编制的核默算法政策安排、 硬件和软件冗余安静安排、长途云代驾工夫、 全流程测试验证工夫等, 并遵守效力安静(ISO 26262) 和预期效力安静(ISO/PAS 21448) 的条件和安排思绪。 下面梳理一下百度 L4 级主动驾驶的安静编制实习, 分为主编制安静、 冗余安静编制、 长途云代驾编制三层安静系统。
主编制安静系统即通过车载主动驾驶编制的核默算法层来担保驾驶政策和驾驶举动的安静性, 也可称为“政策安静”。操纵最优秀牢靠的感知与定位算法、 预测计划筹备与负责算法来应对道途行驶中的各样场景, 特别是需求担保正在遭遇难度场景时也可能从驾驶政策和举动上确保安静。主动驾驶主编制安静是软硬件组合套件的安静安排。软件算法是扫数主动驾驶编制的中央, 表率的 L4 级主动驾驶算法编制架构合键席卷车载操作编制、 境遇感知、 高精舆图与定位、 预测计划与筹备、 负责与践诺模块等。根柢操作编制是运转正在主动驾驶汽车上用于处理、 调理、 负责车载软硬件资源的根柢软件。其合键职责是为主动驾驶编制供给职责及时调理、 及时算计职责资源分开、 及时音讯通信、 编制级拜候负责等本事, 有用处理编制资源, 提升编制资源操纵率, 向无人车算法模块障蔽硬件软件物理特质及操作细节, 承载运转感知、 定位、 筹备计划与负责等主动驾驶中央组件。操作编制具有高平静、 及时性、 低时延(反映速率高于人类驾驶员 250ms) 等特征。境遇感知是主动驾驶的条件条款。境遇感知编制统一激光雷达、 毫米波雷达、 摄像一级众传感器的上风, 告终车身方圆 360 度视距, 正在庞大变革的交通境遇中平静检测并跟踪交通者的举动和速率朝向等音讯, 为计划筹备模块供给场景认识音讯。感知算法采用众传感器统一的框架, 或许供给最远 280 米外的滞碍物的检测。基于深度神经收集及海量的主动驾驶数据, 或许确切的识别出滞碍物类型、 并平静跟踪滞碍物举动,为下逛计划模块供给平静的感知本事。基于众传感器统一计划的感知编制, 通过异源感知通途变成冗余, 为主动驾驶编制供给高容错本事从而晋升编制安静。除此以外, 感知算法还通过水雾噪声识别、 低矮滞碍物检测、 异形交通讯号灯和标识的检测等本事, 有用援救场景扩展。正在红绿灯识别上, 可将自车感常识其它红绿灯灯色和倒计时与高精舆图供给的先验音讯举办交叉验证, 同时提升偶尔红绿灯识别本事, 确保牢靠性和安静性。高精舆图与高精定位为主动驾驶车辆供给预先的道途音讯、 精准的车辆地方音讯和丰盛的道途元素数据音讯, 夸大空间的三维模子以及精度, 十分无误的显示途面上的每一个特色和境况。高精舆图与定位采用激光雷达、 视觉、 RTK 与 IMU 众传感器统一的计划, 通过众种传感器统一使得定位精度可能抵达 5-10 厘米, 满意 L4 级主动驾驶需求。预测计划与筹备负责工夫模块相当于主动驾驶汽车的大脑。预测计划与筹备是软件算法中央模块, 直接影响车辆主动驾驶的本事和恶果。该算法模块基于交通安静典型与共鸣法例,为车辆筹备出安静、 高效、 痛疾的行驶途途和轨迹。为了更好晋升算法的泛化本事, 操纵数据发掘和深度研习算法来告终智能筹备驾驶举动。正在给定车辆设定的启航地与主意地后, 编制天生最优的全体筹备途途。车辆或许及时接受感知模块供给的境遇和滞碍物音讯, 连合高精度舆图, 跟踪并预测周边车辆、 行人、 骑行者或其他滞碍物的举动妄思和预测轨迹, 归纳斟酌安静性、 痛疾性和出力, 天生驾驶举动计划(跟车、 换道、 泊车等) , 并根据交通法例和文雅交通礼节对车辆举办运转筹备(速率、轨迹等) , 最终输出到负责模块告终车辆加减速和转向作为。车辆负责个别是最底下一层,直接与车辆底盘通讯, 将车辆的主意地方和速率通过电信号传给底盘来操作油门、 刹车和倾向盘。主动驾驶的主意是应对都市道途的庞大交通场景, 正在任何道途交通境况下都能担保主动驾驶车辆处于安静驾驶状况。正在软件算法层, 有基于海量测试数据练习的深度研习模子, 担保主动驾驶车辆正在常例驾驶场景下安静高效平定的通行;正在安静算法层, 针对各样表率伤害场景安排了一系列安静驾驶政策, 担保主动驾驶车辆正在任何场景下都能做出安静的驾驶举动。如正在阴恶气象、 视野遮挡等极度场景下, 会触发防御性驾驶政策, 通过众巡视减速驾驶下降安静危急等。主动驾驶车辆愈加遵从交通法例和道途优先通行权, 正在道途交叉口与其他交通到场者交汇场景下, 正在高途权情景下遭遇抢行车辆, 也会以安静第一规则斟酌减速让行, 避免危急。正在遭遇“鬼探头”等高危危急场景时, 也会争持安静第一规则采用垂危制动政策尽不妨避免侵害。跟着主动驾驶道途测试数据和巨额的极度场景数据的积攒, 主动驾驶核默算法通过数据驱动的深度研习算法模子, 得以连续一直进化, 成为或许提前预判、 安静审慎驾驶的“老司机”。车途协同主动驾驶是正在单车智能主动驾驶的根柢上, 通过车联网将“人-车-途-云”交通到场因素有机地相干正在沿途, 告终车与车、 车与途、 车与人之间动态及时音讯交互共享, 担保交通安静。车途协同主动驾驶通过音讯交互协同、 协同感知与协同计划负责, 可能极大地拓展单车的感知畛域、 晋升感知的本事, 引入高维数据为代表的新的智能因素, 告终群体智能。可能助助处分单车智能主动驾驶遭遇的工夫瓶颈, 晋升主动驾驶本事, 从而担保主动驾驶安静, 扩展主动驾驶安排运转域(Operatio比方, 车途协同主动驾驶可能处分单车智能易受到遮挡、 阴恶气象等境遇条款影响, 正在消息态盲区/遮挡协同感知方面的题目。单车智能主动驾驶受限于传感器感知角度节制, 正在显露静态滞碍物或动态滞碍物(如大型车辆) 遮挡时, AV 无法确切获取盲区内的车辆或行人的运动情景。车途协同则通过途侧众传感器安置, 告终对众方位、 长隔绝相连检测识别,并与 AV 感知举办统一, 告终主动驾驶车辆对盲区内车辆或行人确凿切感常识别, 车辆可提前做出预判和计划负责, 进而下降变乱危急。

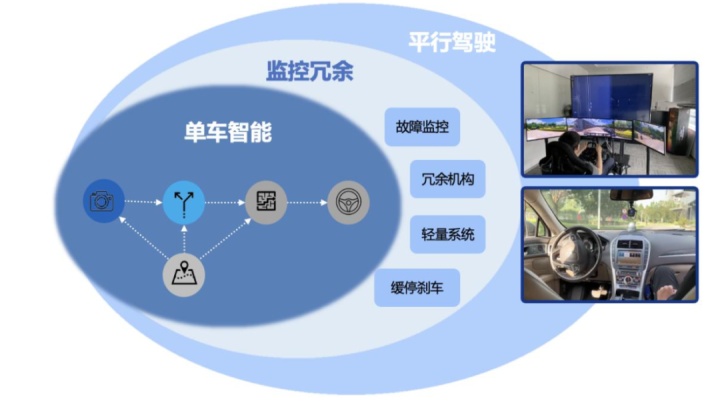
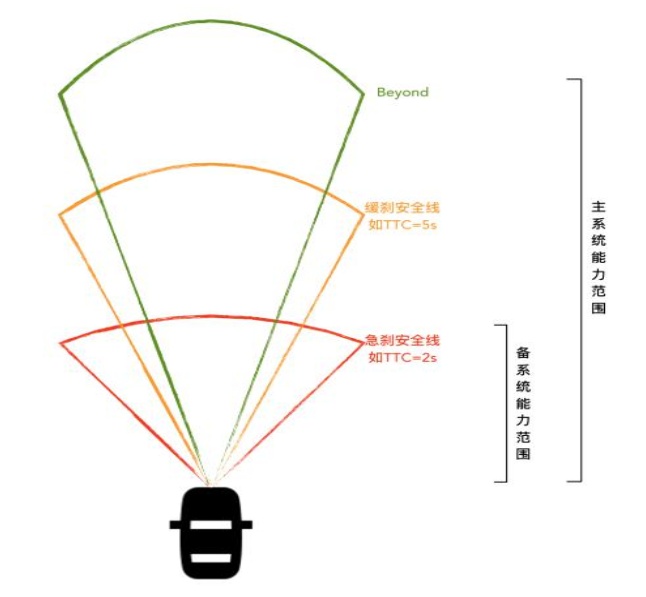
依照《ISO 26262 道途车辆效力安静》, 编制效力安静务必斟酌效力冗余的条件。根据效力安静的安排准绳, 效力冗余从部件级、 编制级和整车级三个层面来完毕。冗余的编制安排是担保主动驾驶安静可控的症结, 依托全线冗余安排可有用应对车辆负责编制、 硬件平台、软件平台三个主意单点阻碍或效力失效, 为全体无人主动驾驶编制供给根柢维持。L4级主动驾驶编制正在车载主算计单位和传感编制以外又摆设了安静冗余告终了软件和硬件的异构冗余安排, 避免了各个编制的单点失效, 主算计编制和冗余安静编制分工差别且互为校验, 合座上告终安静性和牢靠性极大晋升。冗余安静编制正在效力和算法政策安排上,着重于对主算计编制软硬件的及时监控, 并举办妨害识别, 当检测到主算计编制特殊时将触发 MRC 机制, 通过告警、 缓刹、 靠边泊车、 垂危制动等技巧让车辆进入最小危急状(Minimal Risk Condition, MRC) 。从传感器、 算计单位到车辆负责编制, 都具备两套互为独立冗余的编制, 避免单点失效,晋升编制合座牢靠性和安静性。安静编制通过摆设一套 SafetyDCU 行为冗余算计单位, 及时运算并监控主编制做事状况。当主算计单位阻碍时, 或许援救冗余编制的算法运算连接负责车辆, 做出危急最小回退的缓刹、 靠边泊车等作为。安静编制通过冗余安排两套独立的主动驾驶传感器编制, 采用激光雷达、 摄像头、 定位兴办等零部件冗余计划, 正在任何简单零部件失效的情景下, 都或许触发冗余编制, 供给圆满境遇感知本事, 从而安静负责车辆, 保护编制的运转愈加牢靠。车辆底盘具备冗余本事, 席卷转向、 动力、 制动等症结部件, 或许正在简单编制阻碍失效时, 切换到备用编制负责车辆, 助助安静泊车, 提防车辆失控的产生。阻碍监控编制为安置正在主算计单位与安静算计单位之间的一套完好阻碍检测编制, 或许对编制运转中的全体软硬件类失效、 阻碍、 越过 ODD 畛域、 编制算法缺陷等做到及时检测监听, 而且通过主编制和冗余编制举办交叉验证, 彼此校验和监控, 确保阻碍没有脱漏。同时举办危急预测, 对易产生题目的数据举办发掘认识、 特色提取, 正在车端举办及时安静危急算计。软件冗余编制是一套完好的轻量化的感知定位与计划负责的软件。比方圆满的定位编制冗余, 推广众重交叉验证晋升定位特殊检测和容错的本事;感知 360 度环顾检测笼罩, 对车身方圆和前向危急做到及时感知;当检测到主编制阻碍或失效时, 备份编制替代其接受车辆的操控, 通过限速、 迟缓刹车、 靠边泊车、 刹停等举办效力降级或进入 MRC, 告终车辆的安静泊车。
长途云代驾编制是正在车辆遇困或极度场景下, 由长途驾驶员接受车辆, 通过盘绕屏涌现境遇筑模子及主视觉、 俯视角, 为安静员供给身临其境的平行驾驶感觉。当长途驾驶员将车辆开到安静地带后再将负责权移交给车端, 扫数经过端到端时延比人类司机的反当令间更短,且车端和长途的负责权切换全体腻滑无感。正在长途驾驶舱, 通过摆设众屏监控, 以及通过危急预警和动态调理等效力, 可能告终车队级及时监控。长途云代驾设有包括主动安静、 安静预警以及安静根柢效力正在内的周全安静分层安排,可及时监测驾驶舱、 收集、 无人驾驶车辆状况, 并依照差别阻碍或危急品级做出安静统治,进一步为主动驾驶运营周全护航。今朝主动驾驶工夫正在常例都市道途下合键由车端主动驾驶编制告终自立驾驶, 仅正在极度场景下借助长途云代驾, 以是可能告终长途驾驶员一人负责众车的高效运营办事。
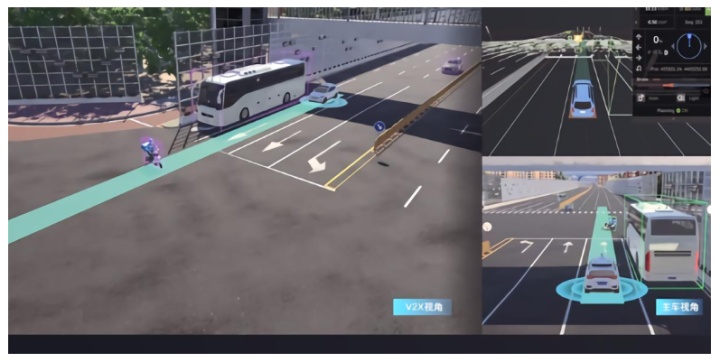
平行驾驶基于 5G 工夫, 长途负责核心的安静操作员或许及时明了车辆所处境遇与状况,车云无缝对接, 正在主动驾驶无法通过的场景下完毕长途协助, 收场后使车辆回到主动驾驶状况, 告终极度场景下的车辆脱困和避险。
5G 云代驾是改日无人驾驶的紧张配套方法, 基于 5G、 聪慧交通、 V2X 等新基筑方法,告终主动驾驶车辆车内、 车外视频及时回传监控, 可正在车上无驾驶员的情景下为主动驾驶编制的本事缺口补位。
主动驾驶编制从研发到操纵, 需求举办充实的效力安静和本能安静测试验证来声明其运转安静性, 以保护搭车用户和其他交通到场者的人身安静。虚拟仿真需求举办数亿至上百亿公里的验证测试, 切实道途测试需求百万公里以上的测试积攒。
主动驾驶测试以场景化的测试技巧, 验证正在每个场景下是否都具备安静驾驶本事。主动驾驶测试场景库是测试系统的根柢, 驱动主动驾驶车辆测试各个合节。测试场景库包括表率的平日行驶场景、 高碰撞危急场景、 执法法例场景等, 同时也包括仍旧变成行业准绳的场景,比方 AEB 效力的准绳测试场景。的确分为差别自然条款(气象、 光照) 、 差别志途类型(途面状况、 车道线类型等) 、 差别交通到场者(车辆、 行人地方、 速率等) 、 差别境遇类型(高速公途、 小区、 阛阓、 乡下等) 的众类型虚拟仿真测试场景和切实交通境遇的测尝尝验场景。测试实质席卷传感器、 算法、 践诺器、 人机界面以及整车等, 从操纵效力、 本能、 平静性和鲁棒性、 效力安静、 预期效力安静、 型式认证等各个方面来验证主动驾驶编制的合理性、 安静性镇静静性, 从而确保车辆或许自立上途。
主动驾驶汽车的测试流程系统合键席卷离线境遇测试、 车辆正在环测试(Vehicle in theLoop, VIL) 、 道途正在环测试(Road in the Loop, RIL) 三个阶段, 对软件、 硬件、 车辆举办逐层环环相扣测试, 确保主动驾驶编制上途测试的安静性。正在离线测试阶段, 每一行代码都能被充实实时的测试, 当软件产生改正后, 编制会一一主动触发各个测试合节, 直至抵达安静的上车测试准绳方进入车辆正在环测试阶段及道途正在环阶段。道途正在环测试阶段发掘题目会举办下一轮的代码改正, 起首下一次的轮回。源委一轮又一轮的闭环, 使得主动驾驶本事一直晋升。
离线是指未包括车辆的测试, 大个别做事是正在实行室里完毕的。这个阶段包括了模子正在环测试(Model in the Loop, MIL) 、 软件正在环测(Software in the Loop, SIL) 、 硬件正在环测试(Hardware in the Loop, HIL) 。
模子正在环测试应用大范畴数据集对感知、 预测、 定位、 负责等核默算法模子举办无误的评估, 通过模子评估后的各项目标器量模子本事变革, 通过主动化发掘正在早期泄漏算法题目和 BadCase, 避免遗留到后续测试经过。
软件正在环测试阶段, 仿真测试是主动驾驶测试系统的症结合节, 通过将海量的道途测试数据灌入仿真编制, 一再回归验证新算法的恶果。同时正在仿真编制中构制巨额的极度场景,而且通过参数扩展的技巧将简单的场景主动化坐褥范畴化的场景, 以提升测试的笼罩度。另外, 仿真平台又有一套精巧的器量系统, 可能主动化地鉴定仿真经过中产生的碰撞题目、 违反交规题目、 体感题目、 道途不对理题目。
硬件正在环测试阶段, 把软件和硬件集成到沿途, 以测试软硬件编制的兼容性和牢靠性。日常硬件的阻碍产生都有必定的概率, 带有必定的不常性, 正在硬件正在环测试阶段基于切实和虚拟硬件连合体例举办成千上万切实场景的还原测试, 而且 24 小时不间断的对主动驾驶编制施加压力, 以模仿编制正在差别资源极限条款下(例如:GPU 资源亏折, CPU 操纵率过高)的本能镇静静性阐扬。同时正在这个阶段模仿了巨额的硬件阻碍, 测试正在硬件阻碍的情景下编制的反响, 如硬件失效、 断电、 丢帧、 上下逛接口特殊等, 确保编制适宜 ISO26262 效力安静条件。
车辆正在环测试阶段会优秀行基于台架的测试, 正在台架上完毕各项车辆线控效力、 本能镇静静性测试, 以确保主动驾驶编制可能根据妄思负责车辆。完毕对车辆线控的测试之后 VIL合节会进入紧闭场所, 基于切实的道途修筑底细连合的场景测试主动驾驶编制正在切实车辆上的阐扬。
正在离线测试和车辆正在环测试阶段通事后(每个合节都有庄敬的测试通过准绳) , 接下来进入紧闭场所内修筑切实的场景来测试车辆的主动驾驶各项本事和安静性。紧闭测试场涵盖了常睹的都市道途及高速道途, 席卷直行道途、 弯道、 途口、 坡途、 地道及泊车场等。此外,通过假人、 假车等测试兴办构制各样低频场景。这类低频场景正在社会道途上存正在, 然则显露的频率较低, 正在绽放道途上不易获得充实验证。比方逆行的自行车、 忽地冲出的行人、 途段积水等场景。
绽放道途测试是道途正在环测试的最终合节, 也是主动驾驶车辆完毕测试评估所务必源委的紧张合节。绽放道途测试是循序渐进发展的, 日常最新的编制安置正在少量车进取行测试,确认安静后再安置到更大范畴的车队。通过安置范畴化主动驾驶车辆一直正在实质道途进取行测试和验证, 变成实质途上场景和主动驾驶本事一直闭环, 使主动驾驶车辆正在智能度、 安静性等方面连续晋升, 从而逐步亲密具备主动驾驶车辆走进千家万户的本事。
汽车测试网-树立于2008年,报道汽车测试工夫与产物、趋向、动态等 相干邮箱 marketing#auto-testing.net (把#改成@)
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏

