Simceneter Madymo 2020.1版本中的THOR假人模子仍然更新至V3.1版本,蕴涵EuronCAP THOR和NHTSA THOR两种模子。关于每种THOR模子,又分裂斥地了椭球型和Facet型假人模子,实用于差别的行使斥地阶段。正在THOR的仿真行使中,众人也许境遇过少少假人定位的困扰,下面就来细致先容领悟一下Simcenter Madymo的THOR假人定位题目。下面所述实质,对椭球型或Facet型假人模子都有用。
Madymo THOR假人的H点,与物理THOR假人的H点是所有重合的,其定位只需将试验丈量结果直接输入到假人H点定位铰Dummy_jnt的各个自正在度上即可。
物理THOR假人策画有4个档位,代表假人差别的坐姿。可能通过状貌调剂装配举办调度。其4个档位ERECT、NEUTRAL、SLOUCHED、SUPER SLOUCHED分裂对应角度为-9°、0°、9°、12°。正在NCAP试验中,POSTURE条件调度正在SLOUCHED档位,即POSTURE角度为9°。
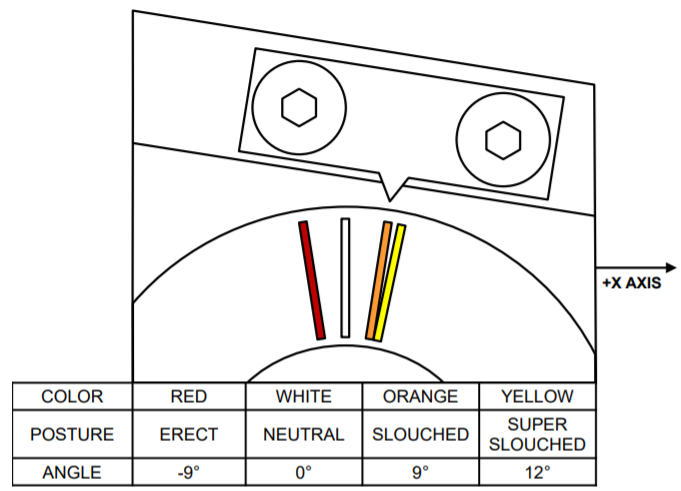
而正在Madymo THOR假人的模子中,界说了用于调度假人状貌的DEFINE参数SpineLowPitchAngle。依照试验摆放的状貌,输入对应的数值即可。

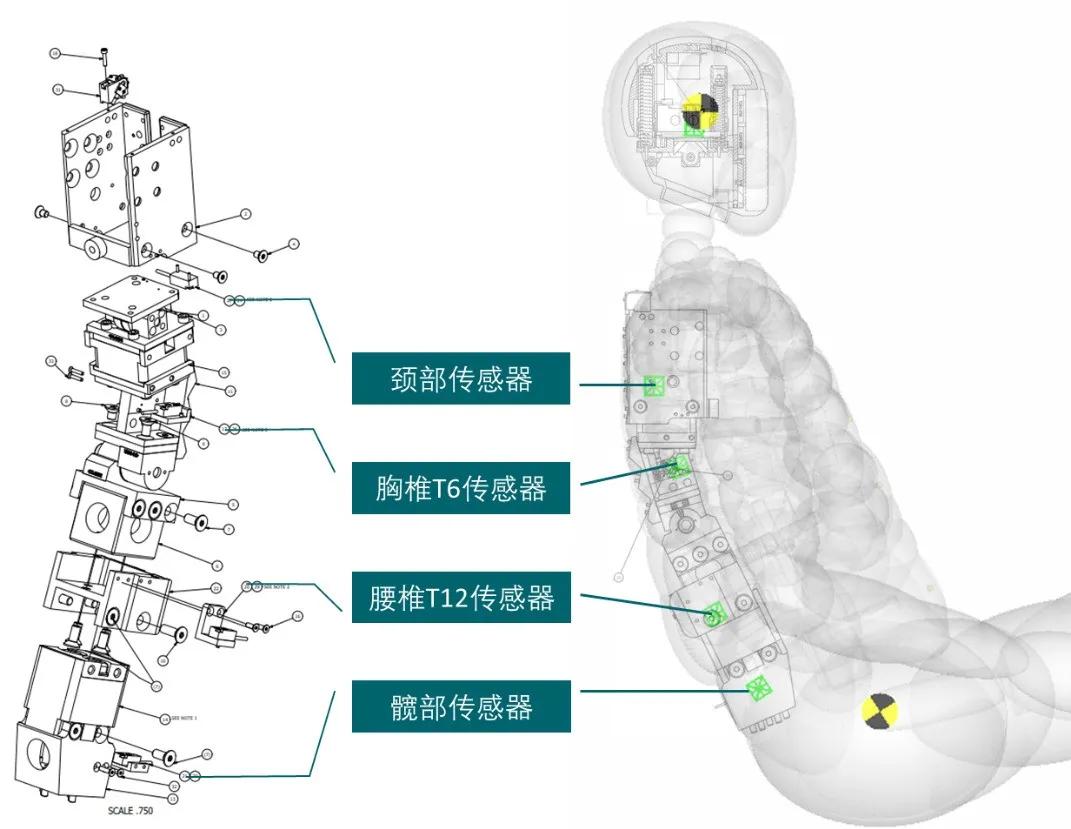
确定假人髋部及上半身场所的有4个倾角传感器:髋部传感器、腰椎T12传感器、胸椎T6传感器、颈部传感器。这些倾角传感器,可能直接读取各个部位的摆放角度。
这些倾角传感器正在Madymo THOR假人上分裂对应的场所,为下图绿色标志点的场所。倾角传感器安置正在一个固定的平台上,是代表该处与秤谌宗旨的夹角。丈量取得的角度,与Madymo THOR假人的状貌定位角或物理假人的机构转动角之间存正在必定的相干。咱们分裂从假人物理策画方面,以及Madymo THOR假人修模方面来清晰他们的相干。
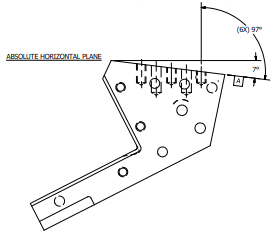
物理THOR假人,髋部倾角传感器被安置正在物理假人的髋部基准模块(Pelvis base Module)上。而髋部基准模块的传感器安置平台,与绝对秤谌面存正在7°的夹角。即假人竖直坐姿安置时,髋部倾角传感器的读数应为7°。髋部基准模子示贪图如下。
试验中髋部倾角传感器的读数用参数PelvisTiltSensorY透露。如,髋部倾角传感器的读数值为33°,则有

将髋部倾角传感器的读数直接界说为髋部角,则有PelvisPitchAngle=PelvcTiltSensorY,即:

关于Madymo THOR假人模子,髋部角通过Dummy_jnt的Y向转动来定位。而假人的Dummy_jnt初始宗旨与秤谌宗旨一律,即Y向初始角度与THOR髋部倾角传感器存正在7°夹角。以是关于Madymo THOR假人的Dummy_jnt Y向转动角度可能诈骗下面相干确定。
腰椎倾角传感器与髋部倾角传感器之间的夹角,咱们界说为腰椎弯曲角,用参数LumbarBendingAngle透露。
以是腰椎的弯曲角度LumbarBendingAngle,存正在以下相干式,个中LumbarTiltSensorY为腰椎T12倾角传感器读数:

前面先容假人状貌POSTURE,咱们界说参数SpineLowPitchAngle来透露POSTURE状貌角度。而这个角度,代表的是腰椎T12倾角传感器LumbarTiltSensorY与胸椎T6倾角传感器ThoracicTiltSensorY之间的夹角。即相合系#LumbarTiltSensorY = #ThoracicTiltSensorY + #SpineLowPitchAngle。

正在Madymo THOR假人的模子中,腰椎的弯曲宗旨通过两个铰LumbarSpineUp_jnt和LumbarSpineLow_jnt的Y向转动来完毕。将腰椎弯曲角度LumbarBendingAngle等分到两个铰中,即可完毕Madymo THOR假人的腰椎定位。如下透露:


颈部倾角传感器与胸椎倾角传感器之间的夹角,咱们界说为胸椎弯曲角,用参数ThoracicBendingAngle透露。
颈部倾角传感器安置正在颈部俯仰改良装配(Neck Pitch Change Mechanism)的上平台。颈部俯仰改良装配形成的夹角,咱们界说为颈部俯仰角,用参数NeckPitchAngle透露。依照颈部俯仰改良装配的策画程序,每调剂一个齿,角度将改良3°。
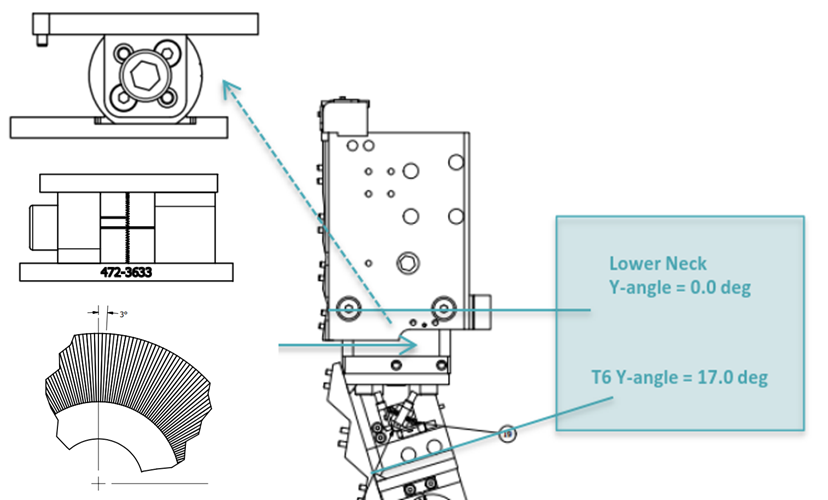

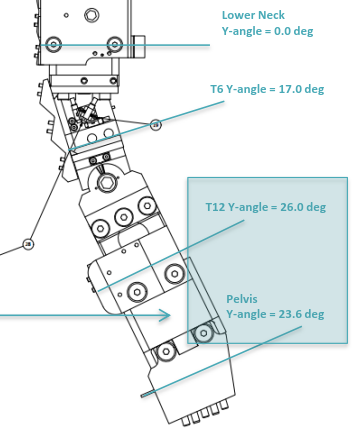
依照THOR的策画程序,当颈部俯仰改良装配维持中性形态时,颈部倾角传感器NeckTiltSensorY与胸椎倾角传感器ThoracicTiltSensorY的夹角为17°。

正在Madymo THOR假人模子中,胸椎弯曲角的改良通过自正在铰ThoracicSpineFlex_jnt的Y向转动来完毕,以是改良ThoracicSpineFlex_jnt的Y向角度如下。

假人的颈部弯曲角,用参数NeckBendingAngle来透露,将确定着头部的转角及重心场所。通过颈部倾角传感器NeckTiltSensorY,以及头部倾角传感器HeadTiltSensorY(如下界说)可能确定颈部弯曲角度。

依照THOR假人的策画程序,当颈部笔直形态时,头部倾角传感器与颈部倾角传感器之间没有角度偏移,即夹角为0°。以是颈部弯曲角NeckBendingAngle可能透露为:

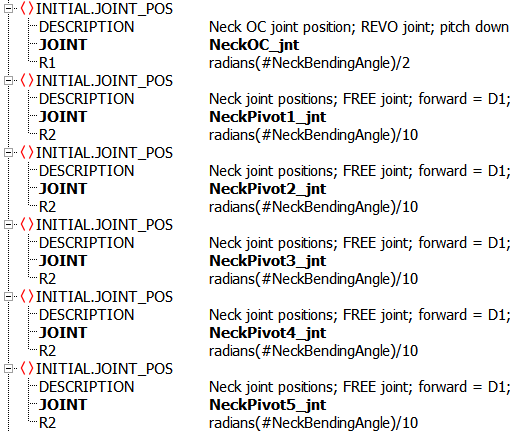
正在Madymo THOR假人模子中,颈部模子由6个铰构成,这些铰的转动,配合变成假人颈部弯曲角。而为了避免THOR假人模子的颈部初始力矩过大,将颈部弯曲角合理分拨到每个铰的转动自正在度上。参考界说如下:
Madymo THOR假人的手脚定位,所有依照物理假人的定位值,调剂各个合节对应的铰自正在度即可。跟混III假人以及其他完全假人的定位办法相像,纯粹易剖析,这里不再赘述。
汽车测试网-开创于2008年,报道汽车测试身手与产物、趋向、动态等 干系邮箱 marketing#auto-testing.net (把#改成@)
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏
