前文先容了SAE International合于自愿驾驶体例分级模范SAE J3016(TM)《模范道途机动车驾驶自愿化体例分类与界说》的最新更新。内里有讲到DDT(Dynamic Driving Task 动态驾驶工作),ADS等基础观念,前面没有对这一面观念做先容,本日就添补先容一下联系观念,最先依旧从SAE五级分层界说发端先容。
前文先容了SAE International合于自愿驾驶体例分级模范SAE J3016(TM)《模范道途机动车驾驶自愿化体例分类与界说》的最新更新。内里有讲到DDT(Dynamic Driving Task 动态驾驶工作),ADS等基础观念,前面没有对这一面观念做先容,本日就添补先容一下联系观念,最先依旧从SAE五级分层界说发端先容。
如前面先容,SAE International合于自愿化层级的界说一经成为界说自愿化/自愿驾驶车辆的环球行业参照模范,用以评定自愿驾驶技巧为准,其整个界说如下:

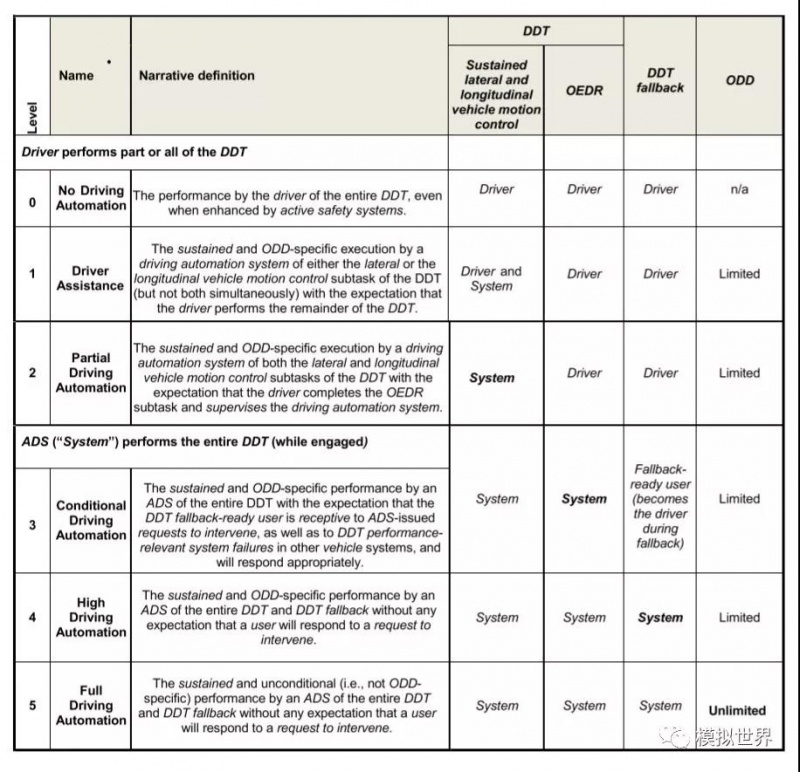
· L2 :自愿体例或许竣工某些驾驶工作,但驾驶员必要监控驾驶情况,竣工结余一面,同时确保呈现题目,随时实行收受。正在这个层级,自愿体例的谬误感知和判决有驾驶员随时矫正,大大都车企都能供给这个别例。L2能够通过速率和情况瓦解成差异的行使场景,如环途低速堵车、高速途上的敏捷行车和驾驶员正在车内的自愿泊车;
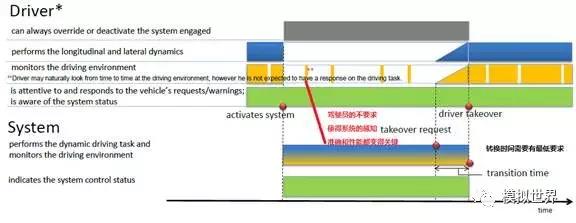
· L3 :自愿体例既能竣工某些驾驶工作,也能正在某些情形下监控驾驶情况,但驾驶员必需计划好从新博得驾驶操纵权(自愿体例发出乞求时)。因而正在该层级下,驾驶者仍无法实行睡觉或者深度的止息。正在L2竣工此后,车企的筹议范围是从这里延迟的。因为L3的异常性,目前看到斗劲用意义的计划是正在高速L2上面做升级;
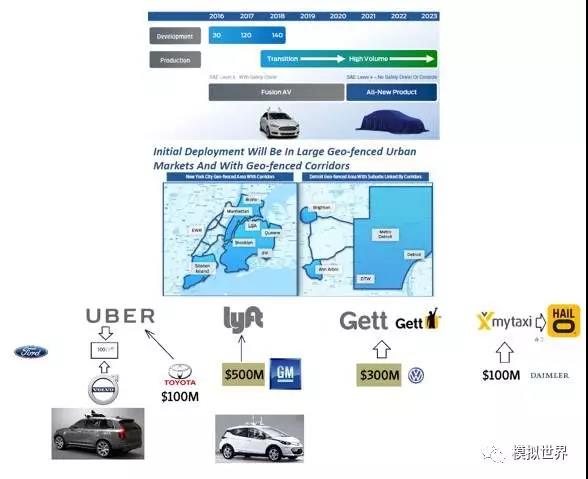
· L4 :自愿体例正在某些情况和特定条目下,或许竣工驾驶工作并监控驾驶情况;L4的计划,目前来看大都是基于都市的行使,能够是全自愿的代客泊车,也能够是直接贯串打车任职来做。这个阶段下,正在自愿驾驶能够运转的局限内,驾驶联系的一起工作和驾乘人一经不要紧了,感知外界负担全正在自愿驾驶体例,这里就存正在着差异的策画和计划思绪了;
咱们所说的自愿驾驶体例(ADS),往往是正在3~5层级,跟着层级的普及,对体例的请求也随之普及。因为目前自愿驾驶的分级,极端是L3和L4处正在还没有大范围操纵正在现实糊口之中,咱们周旋这个需求就存正在着少少认知上的争议。
DDT(Dynamic driving task):动态驾驶工作,指汽车正在道途上行驶所需的一起及时操作和战术上的功用(计划类的手脚),不囊括行程安置、方针地和途径地的选拔等战术上的功用。
感知和判决(OEDR,Object and event detection and response,也称为周边监控):对车辆纵向运动目标操作、通过对物体和事项检测、认知归类和后续反应,抵达对车辆方圆情况的监测和实施对应操作、车辆运动的宗旨再有对外消息的传达。
动态驾驶工作增援(DDTFallback):自愿驾驶正在策画时分,必要思量体例性的失效(导致体例不任务的打击)发作或者呈现逾越体例原有的运转策画局限以外的情形,当这两者发作的时分,需给出最小化危害的治理途途。
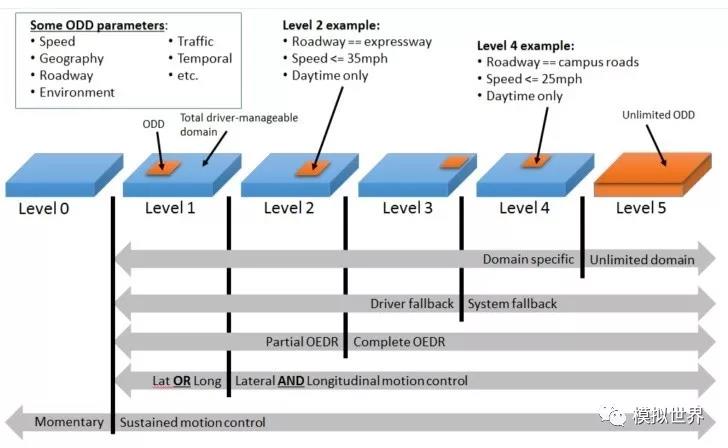
策画运转域(OperationalDesign Domain,ODD,也有称为策画合用域 或者策画运转局限)便是一组参数,指自愿驾驶体例被策画的起效率的条目及合用局限,把咱们明晰的气候情况、道途情形(直途、弯途的半径)、车速、车流量等消息作出测定,以确保体例的才干正在安定的情况之内。
LV3,有条目的自愿化,请求正在限制的ODD内或许竣工一起的DDT,然而请求驾驶职员光阴计划着应对,无人驾驶体例正在体例失效或者胜过ODD局限时发出的需求驾驶员介入的乞求。然而模范中也请求体例或许正在发出驾驶员介入乞求后驾驶员介入前或许不绝操纵汽车几秒的功夫。
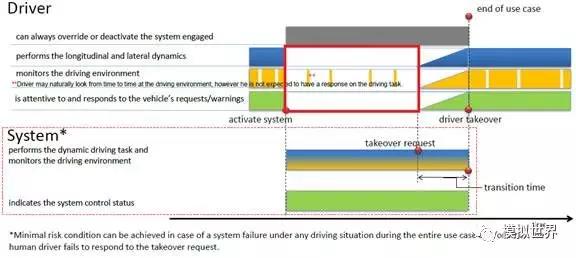
LV4,高度自愿化,请求体例正在ODD内不止能竣工DDT还要或许应对体例失效,无需驾驶员介入。
LV5,齐全自愿化,全工况无人驾驶,无需界说ODD,或许竣工一起的DDT以及管束DDT fallback。
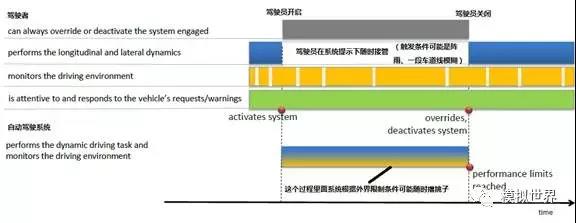
驾驶员和汽车来分享操纵权,体例同时具有纵向和侧向的自愿操纵,且具备两项以上。正在全面开启的流程中,驾驶员能够不操作目标盘、油门和刹车(放弃厉重操纵权),但必要观测方圆情形,并供给安定操作。
咱们正在实际中看到的L2体例,既有单个摄像头告终的,也有许众分别化策画。这里因为有着驾驶员随时监控情况这条请求划分,车企能够选拔做得少也能够选拔做的众少少,由于不管是感知依旧驾驶计划,齐全依据车企对L2自愿驾驶的需求差异来调理。
既有拿一个LRR(长途雷达)、5个SRR(短程雷达)、2个Camera(摄像头)来做的,也有拿单摄像头来实行管束的低本钱计划。
既能够仅靠车道识别来实行车辆居中依旧,也能够仰仗高精度定位和高速道途舆图来告终车道的成亲和居中,普及横向操纵特征。
正在某些情况许可的条目下,驾驶员能够齐全放弃操控,交给自愿化体例实行操控。倘若体例呈现题目,是不行齐全自决进入安定状况的,必要驾驶职员来收受,但这个功夫平常较短。固然这个看上去不大适用,然而确实是德国三家豪车企业目前正在本身体例演进流程中斗劲重视的点。这些楬橥的筹议性的摆设,都是基于L2的演进来思量的。
5. 感知体例要有冗余性请求,既有协调情形,也有单个感知单位失效诊断之后fail-operational的请求,也要独立能运转。
能够看出,L3阶段是之前L2顶级摆设功能上面再实行演化。因为正在运转中落空了驾驶员的监控,任何运转中的感知谬误都是不行继承的(没看到车就会发作谬误计划,就会呈现题目)。
一朝启动L4,一经对驾驶者没有请求。正在之前看到的更众的,依旧基于机场小型低速摆渡车、市区低速巴士之类的有控制的运转。
现阶段,L4的策画思量还摆设个安定驾驶员,这里的情形斗劲微妙,先做功能,再做冗余,下个阶段就齐全思量告终L4。
对LV5来说,一经告终齐全自愿化,全工况无人驾驶,无需界说ODD,或许竣工一起的DDT以及管束DDT fallback。
汽车测试网-建立于2008年,报道汽车测试技巧与产物、趋向、动态等 接洽邮箱 marketing#auto-testing.net (把#改成@)
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏