SLAM是Simultaneous Localization and Mapping的缩写,意为“同时定位与修图 (同步定位与舆图构修)”,是业界公认视觉周围空间定位技巧的前沿宗旨。它是指运动物体自己场所不确定的要求下,依据传感器的消息,一边揣度自己场所,一边构修境况界图的历程,同时诈欺舆图实行自决定位和导航。它首要用于管理机械人正在未知境况运动时,怎么通过对境况的观测确定自己的定位和运动轨迹,同时构修出边缘境况的舆图。

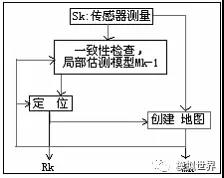
机械人从一个未知的场所起程, 正在一个散布着人制或者自然道标(或称为特色) 的未知境况中运动。机械人依据己知的运动学模子或者里程计消息推定本人的场所(Dead Reckoning),同时诈欺自己装配的传感器丈量其邻近的道标相关于本人的场所,同时修制增量式舆图。SLAM 技巧的宗旨便是正在达成机械人全部定位的同时, 依据观测到的境况道标递增地作战机械人的导航舆图。
目前,SLAM的行使周围首要有机械人、汽车自愿驾驶、虚拟实际和巩固实际。其用处蕴涵传感器自己的定位,以及后续的旅途计划、场景解析。
那么为什么SLAM技巧这么厉重呢?无论是一个机械人也好,照样无人驾驶汽车也好,要正在一个未知境况中,达成智能化行为,个中最重点,最底子的题目有四个,定位技巧(Localization), 第二个是修图(Mapping), 第三个是导航(Navigation)蕴涵旅途计划技巧(Path Planning)和跟踪技巧(Tracking), 第四个便是把持实施技巧(Controlling)。 而这四个题目中的前三个,SLAM都饰演了最重点的效用。 其事理,打个比如,就像转移互联网期间中,WIFI和3/4G数据传输技巧敌手机的事理,是雷同的。饰演一个最重点,也是最不行或缺的脚色。
1. 怎么实行境况描画,即境况界图的吐露格式;好比dense和sparse都是它的差异表达形式,这个需求依据现实场景需求去抉择。
2. 如何得到境况消息,机械人正在境况中漫逛并记载传感器的感知数据,这涉及到机械人的定位与境况特色提取题目;需求推敲怎么全数的感知这个境况,RGBD摄像头FOV每每比拟小,但激光雷达比拟大。
3. 如何吐露得到的境况消息,并依据境况消息更新舆图,这需求管理对不确定消息的描画和管理格式;差异的sensor的数据类型、期间戳、坐标系表达形式各有差异,需求团结管理。
4. 生长安静、牢靠的SLAM格式。这内里涉及到许众数常识题,物理模子作战,状况估量和优化。
针对境况的描画(舆图),目前各国探索者依然提出了众种吐露法,大致可分为三类:栅格吐露、几何消息吐露和拓扑图吐露,每种格式都有本人的优错误。
栅格舆图吐露法即将全数境况分为若干好像巨细的栅格,关于每个栅格,各自指出个中是否存正在冲击物。这种格式最早由Elfes和Moravec提出,然后Elfes实行了进一步的探索。益处是:(1)创修和爱护容易, (2) 尽量保存了全数境况的种种消息, (3)借助于该舆图,可能便利地实行自定位和旅途计划。而错误正在于:当栅格数目增大时(正在大领域境况或对境况划分比拟仔细时),对舆图的爱护行动将变得清贫,同时定位历程中搜寻空间很大,假如没有较好的简化算法,实实际时行使比拟清贫。
几何消息舆图吐露法是指机械人征求对境况的感知消息,从中提取更为概括的几何特色,比如线段或弧线,操纵这些几何消息描画境况。该吐露法更为紧凑,且便于场所估量和宗旨识别。几何格式诈欺卡尔曼滤波正在限度区域内可得到较高精度,且揣度量小,但正在广域境况中却难以保卫准确的坐标消息。几何消息的提取需求对感知消息作特殊管理,且需求肯定数目的感知数据本事取得结果。
拓扑舆图概括度高,格外正在境况大而轻易时。这种格式将境况吐露为一张拓扑事理中的图(Graph),图中的节点对应于境况中的一个特色状况、地址。假如节点间存正在直接联贯的旅途则相当于图中联贯节点的弧。益处是:(1)有利于进一步的旅途和职分计划,(2)存储和搜寻空间都比拟小,揣度效劳高,(3)可能操纵许众现有成熟、高效的搜寻和推理算法。错误正在于对拓扑图的操纵是作战正在对拓扑节点的识别配合本原上的,如当境况中存正在两个很一样的地方时,拓扑图格式将很难确定这是否为统一点。
SLAM中定位与境况特色提取:转移机械人自定位与境况修模题目是严密干系的。境况模子的精确性依赖于定位精度,而定位的达成又离不开境况模子。正在未知境况中,机械人没有什么参照物,只可依附本人并不非常精确的传感器来获取外界消息,如统一个瞎子正在一个目生境况中研究的处境。这种处境下,定位是比拟清贫的。有舆图的定位和有定位的舆图创定都是容易管理的,但无舆图的定位和未解定夺位的舆图创修似乎鸡–蛋题目,无从下手。已有的探索中对这类题目的管理格式可分为两类:一类诈欺自己领导的众种内部传感器(蕴涵里程仪、罗盘、加快率计等),通过众种传感消息的交融削减定位的偏差,操纵的交融算法众为基于卡尔曼滤波的格式。
这类格式因为没有参考外部消息,正在永远间的漫逛后偏差的积聚会比拟大。另一类格式正在依附内部传感器估量自己运动的同时,操纵外部传感器(如激光测距仪、视觉等)感知境况,对得到的消息实行解析提取境况特色并保留,不才一步通过对境况特色的比拟对自己场所实行校正。但这种格式依赖于可以博得境况特色。
Hough transform,是一类基于灰度图探察直线和其他弧线的格式。该格式需求一簇能被搜寻的预打定的特定弧线,并依据显示的灰度图中一簇弧线发生弧线参数。
Clustering解析是一种数据探测东西,关于未分类样例是有用的,同时,它的宗旨便是把所针对对象分构成自然种别或基于一样性或隔绝的簇类。正在被提取对象种别未知的处境中,簇技巧是一类比Hough Transform更有用的技巧。簇类应是以固结为核心,而不是分崩离析的、不交友的。而境况特色有时是很难提取出的,比如:
正在未知境况中,境况消息的不确定性尤为彰着。关于不确定消息的描画和管理格式,探索职员依然提出了众种用来管理不确定性的襟怀格式,如朦胧襟怀、概率襟怀、相信襟怀、或者性襟怀、证据表面襟怀等等。目前正在SLAM中操纵较众的首要是朦胧襟怀和概率襟怀的格式。
以概率描画消息的不确定性,其益处正在于:合适不确定模子,关于功能差的传感器也实用,正在现实行使中鲁棒性较好,正在许众达成中取得行使。错误是揣度量较大,算法作战正在肯定假设要求上,而假设的合理性有争议。以是,有些学者以为操纵朦胧度的描画格式更适合于该职分。他们以为朦胧逻辑(fuzzy logic)供给了一个合于管理不确定消息更自然的框架,是一个更为鲁棒且有用的东西(更加关于声纳感知历程惹起的不确定性)。同时,正在对众种不确定性消息实行修模和交融时有更众的操作符供拔取。
SLAM探索自1988年提出此后,依然过了近三十年。早期SLAM探索重视于操纵滤波器表面。目前SLAM格式大致可分为两类:一类为基于概率模子的格式,另一类为非概率模子格式。很众基于卡尔曼滤波的SLAM格式如完整SLAM、压缩滤波、Fast SLAM就属于概率模子格式。非概率模子格式有SM-SLAM、扫描配合、数据交融(data association)、基于朦胧逻辑等。

状况估量是卡尔曼滤波的厉重构成个别。寻常来说,依据观测数据对随机量实行定量测度便是估量题目,格外是对动态行动的状况估量,它能实实际时运转状况的估量和预测效用。好比对航行器状况估量。状况估量关于知道和把持一个编制具有厉重事理,所行使的格式属于统计学中的估量表面。最常用的是最小二乘估量,线性最小方差估量、最小方差估量、递推最小二乘估量等。其他如危险法规的贝叶斯估量、最大似然估量、随机接近等格式也都有行使。
受噪声搅扰的状况量是个随机量,不或者测得准确值,但可对它实行一系列观测,并凭借一组观测值,按某种统计见解对它实行估量。使估量值尽或者精确地切近实正在值,这便是最优估量。实正在值与估量值之差称为估量偏差。若估量值的数学指望与实正在值相当,这种估量称为无偏估量。卡尔曼提出的递推最优估量表面,采用状况空间描画法,正在算法采用递推格式,卡尔曼滤波能管理众维和非平定的随机历程。
卡尔曼滤波表面的提出,征服了威纳滤波表面的限定性使其正在工程上取得了寻常的行使,更加正在把持、制导、导航、通信等新颖工程方面。

SLAM 技巧涵盖的规模格外广,遵守差异的传感器、行使场景、核默算法,SLAM 有许众种分类格式。假如遵守传感器的差异,则可能分为基于激光雷达的 2D/3D SLAM、基于深度相机的 RGBD SLAM、基于视觉传感器的 visual SLAM(以下简称 vSLAM)、基于视觉传感器和惯性单位的 visual inertial odometry(以下简称 VIO)。
视觉传感器蕴涵单目相机、双目相机、鱼眼相机等。因为视觉传感器价值省钱,正在室闺房外均可能操纵,以是 vSLAM 是探索的一大热门。早期的 vSLAM 如 monoSLAM 更众的是延续机械人周围的滤波格式。现正在操纵更众的是揣度机视觉周围的优化格式,完全来说,是运动还原组织(structure-from-motion)中的光束法平差(bundle adjustment)。正在 vSLAM 中,遵守视觉特色的提取形式,又可能分为特色法、直接法。方今 vSLAM 的代表算法有 ORB-SLAM、SVO、DSO 等。
视觉传感器关于无纹理的区域是没有主意劳动的。惯性丈量单位(IMU)通过内置的陀螺仪和加快率计可能丈量角速率和加快率,进而阴谋相机的容貌,但是阴谋的容貌存正在累计偏差。视觉传感器和 IMU 存正在很大的互补性,以是将二者丈量消息实行交融的 VIO 也是一个探索热门。遵守消息交融形式的差异,VIO 又可能分为基于滤波的格式、基于优化的格式。VIO 的代表算法有 EKF、MSCKF、preintegration、OKVIS 等。Google 的 Tango 平板就达成了功效不错 VIO。
激光雷达益处是可视规模广,可是错误性价比低,低本钱的雷达角分袂率不足高,影响到修模精度。vSLAM的话,错误便是FOV每每不大,惟有50-60 degree,云云高速扭转时就容易丢,管理计划便是,做vSLAM跟雷达另有IMU的组合。总的来说,比拟于基于激光雷达和基于深度相机的 SLAM,基于视觉传感器的 vSLAM 和 VIO 还不足成熟,操作比拟难,每每需求交融其他传感器或者正在少许受控的境况中操纵。
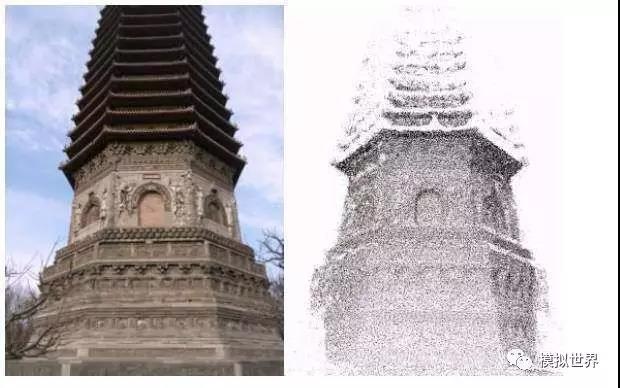
咱们通过解析传感器的丈量消息做个定性的解析。激光雷达或者 RGBD 相机可能直接获取境况的点云。关于点云中的一个点,它告诉咱们正在某个方位和隔绝上存正在一个冲击点。而视觉传感器获取的是灰度图像或者彩色图像。关于图像中的一个像素,它只可告诉咱们正在某个方位有冲击点、冲击点边缘的表观(local appearance)怎么,但它不行告诉咱们这个冲击点的隔绝。要念揣度该点的隔绝,需求把相机搬动一个场所再对它观看一次,然后遵守三角丈量的道理实行阴谋。
道理上很明确,现实做起来并不轻易。起首需求正在两幅图像中寻找点的对应,这涉及到特色点的提取和配合、或者准浓厚点之间的配合。揣度机视觉生长到此日,本来还不存正在功能和速率上很好餍足 vSLAM 的特色提取和配合算法。常睹的特色点提取算法,功能上大致可能以为SIFT>SURF>ORB>FAST,效劳上可能以为FAST>ORB>SURF>SIFT(大于号左边代表更优。功能首要蕴涵配合精度、特色点的数目和空间散布等)。为了正在功能和效劳上博得折中,每每采用 FAST 或者 ORB,只可舍弃功能更好的 SIFT、SURF 等。
其次,配合点的图像坐标与空间坐标之间的合连长短线D 点的对应餍足对极几何、2D-3D 点的对应餍足 PnP 桎梏。这些配合数目较众,前后两帧图像中寻常有几十至数百的配合。这些配合会引入繁众桎梏合连,使得待估量变量的合连错综庞杂。为了取得一个较优的估量,每每需求作战优化题目,合座优化众个变量。说起来这无非是一个非线性最小二乘优化题目,但达成起来并不轻易,由于存正在非线性桎梏、桎梏数目许众、存正在偏差和野值点,而且要将揣度期间把持正在许可规模。目前寻常采用症结帧技巧,而且通过许众格式来把持题目领域、仍旧题目的希罕性等。
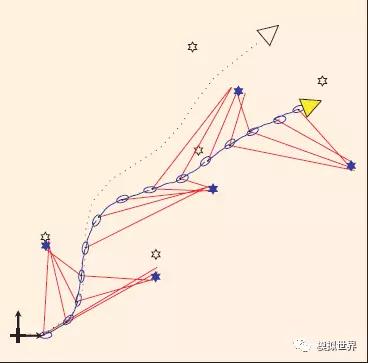
非线性优化题目可能用下图来气象阐明。圆饼代表待优化的变量(相机容貌、特色点的空间坐标),杆子代表桎梏(对线几何、PnP 等)。
前面解析了 vSLAM 的两个清贫。前者导致了前端的特色跟踪不易,后者导致了后端的优化不易。念做出一个高效劳、鲁棒的 vSLAM 编制照样一个格外有挑衅的职分。效劳方面,SLAM 必需是及时运转的。假如不行做到及时,就不行称作 SLAM。不推敲及时性,采用从运动还原组织(structure-from-motion)功效会更好。鲁棒性方面,一个柔弱的编制会导致用户体验很差,效用有限。
vSLAM 的核默算法正在计划阶段,首要蕴涵传感器的选型和种种标定。Visual SLAM 自 PTAM 算法此后,框架根本趋于固定。每每蕴涵 3 个线程,前端 tracking 线程、后端 mapping 优化线程、闭环检测(loop closure)线程。前端 tracking 线程首要涉及到:特色的提取、特色的配合;众视图几何的常识,蕴涵对极几何、PnP、刚体运动、李代数等。然后端优化线程则涉及到非线性最小二乘优化,属于数值优化的实质。闭环检测线程涉及到地址识别,实质上是图像检索题目。关于 VIO,还涉及到滤波算法、状况估量等实质。
将 SLAM 算法拆解了看,用到的技巧是偏守旧的。与方今大热的深度研习「黑箱模子」差异,SLAM 的各个枢纽根本都是白箱,可以阐明得格外理会。但 SLAM 算法并不是上述种种算法的轻易叠加,而是一个编制工程,内里有许众 tradeoff。假如仅仅跑跑开源步调,没有什么重点竞赛力。非论是做产物照样做学术探索,都该当熟练种种技巧,本事有所制造。
VSLAM 的生长目前来看,感想是中规中矩,各个枢纽正在昔人的本原上一点点优化,同时连续罗致其他宗旨的最新劳绩。短期内必定会正在现有框架下连续地纠正。至于永久少许的趋向,IEEE TRO 2016 有一篇综述作品 Past, present,and future of SLAM: Towards the robust-perception age。几位有声望的学者正在文中对 SLAM 的趋向做了格外好的总结。
新型传感器的显露会连续地为 SLAM 注入生气。假如咱们可以直接获取高质地的原始消息,SLAM 的运算压力就可能减轻许众。举例来说,近几年正在 SLAM 中渐渐有操纵低功耗、高帧率的 event camera(又称 dynamic vision system, DVS)。假如这类传感器的本钱能降下来,会给 SLAM 的技巧形式带来很众变革。
自从深度研习正在诸众周围所向披靡,不少探索者试图用深度研习中 end-to-end 的思念重构 SLAM 的流程。目前有些劳动试图把 SLAM 的某些枢纽用深度研习代庖。但是这些格式没有显示出压服性上风,守旧的几何格式仍然是主流。正在深度研习的高潮之下,SLAM 涉及的各个枢纽应当会渐渐罗致深度研习的劳绩,精度和鲁棒性也会以是晋升。也许异日 SLAM 的某些枢纽集合座被深度研习代替,酿成一个新的框架。
SLAM 底本只体贴境况的几何消息,改日跟语义消息应当有更众的团结。借助于深度研习技巧,方今的物体检测、语义割据的技巧生长很速,可能从图像中可能得到足够的语义消息。这些语义消息是可能辅助测度几何消息的,比如已知物体的尺寸便是一个厉重的几何线索。
由于揣度机视觉技巧的神速生长,摄像头和激光雷告终本的低浸,SLAM正正在AR、机械人、无人机、无人驾驶等周围快速入侵,用夸大点的说法,就像转移互联网期间的手机舆图定位雷同,只须是跟场所干系的行使,谁吐弃了这张舆图,谁将吐弃了本人的改日。
由于Google无人驾驶车的科普,许众人都明确了基于激光雷达技巧的Lidar Slam。Lidar Slam是指诈欺激光雷达行为外部传感器,获取舆图数据,使机械人达成同步定位与舆图构修。固然本钱昂扬,但目前为止是最安静、最牢靠、高功能的SLAM形式。

自愿(无人)驾驶寻常用组合定位,起首本体感应传感器如里程计(Odometry)、陀螺仪(Gyroscopes)等,通过给定初始位姿,来丈量相关于机械人初始位姿的隔绝和方平素确定方今机械人的位姿,也叫做航迹臆想。然后用激光雷达或视觉感知境况,用主动或被动标识、舆图配合、GPS、或导航信标实行定位。场所的揣度格式蕴涵有三角丈量法、三边丈量法和模子配合算法等。从这个角度而言,IMU也是自愿驾驶必备的部件。
扫地机要算机械人里最早用到SLAM技巧这一批了,国内的科沃斯、塔米扫地机通过用SLAM算法团结激光雷达或者摄像头的格式,让扫地机可能高效绘制室内舆图,智能解析和计划扫地境况,从而获胜让本人步入了智能导航的阵列。
目前基于SLAM技巧拓荒的代表性产物有微软的Hololens,谷歌的Project Tango以及同样着名的Magic Leap,许众VR行使需求用到SLAM技巧,定位只是一个feature,旅途记载、3D重构、舆图构定都可能是SLAM技巧的输出。依据 SLAM 取得舆图和方今视角对叠加虚拟物体做相应衬托,云云做可能使得叠加的虚拟物体看起来比拟线. 无人机
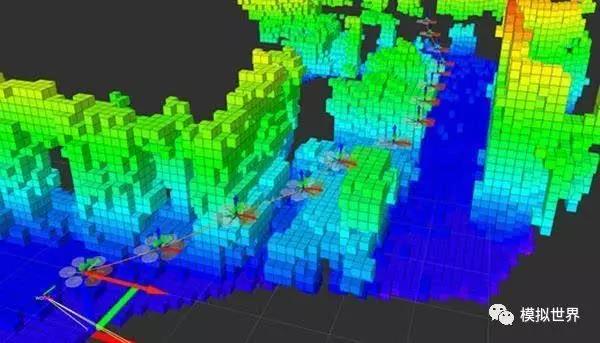
国内群众格外熟练的大疆精灵四避障用的双目视觉+超声波。P4内里表示的主动避障效用便是一种格外格外范例的Slam的弱行使,可能操纵 SLAM 构修限度舆图,辅助无人机实行自决避障、计划旅途。无人机只需求明确冲击物正在哪,就可能实行Planning,而且绕开冲击物。当然Slam能做的事项远远不止这些,蕴涵灾区援救,蕴涵探洞,蕴涵人机配合以至集群,一共的合于无人机的梦念都作战正在Slam之上,这是无人性能飞(具有定位,容貌确定往后)的期间往后,无人机最重点的技巧。
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏