一.途径跟踪简介正在途径跟踪历程中,参考轨迹弧线与功夫参数无闭,跟踪轨迹时能够假设无人车以目下速率匀速行驶,以肯定的价格轨则变成行驶途径趋近于参考途径;
正在途径跟踪历程中,参考轨迹弧线与功夫参数无闭,跟踪轨迹时能够假设无人车以目下速率匀速行驶,以肯定的价格轨则变成行驶途径趋近于参考途径;而轨迹跟踪,其参考途径弧线与功夫和空间均闭联,而且央浼无人车正在法则功夫内抵达某一预设好的参考途径点。
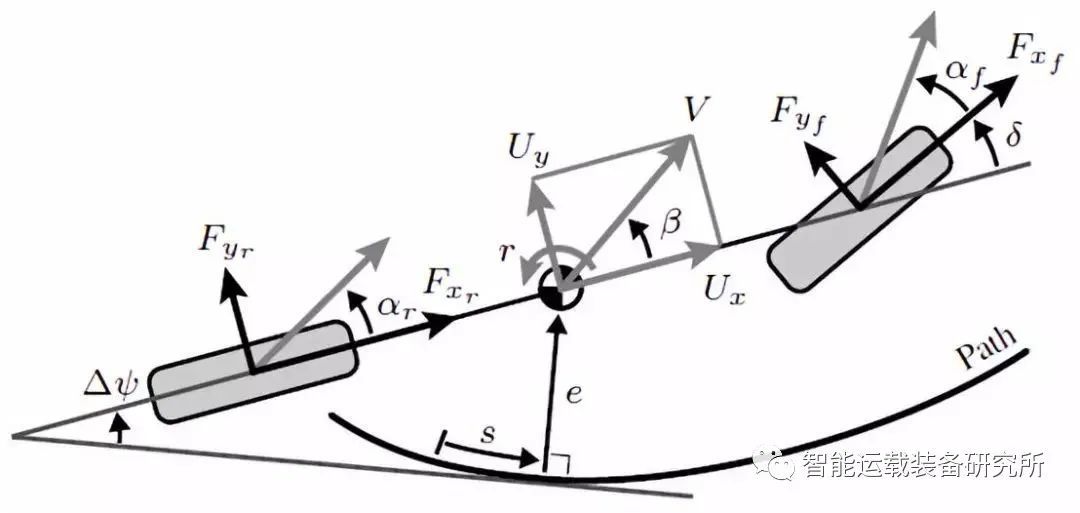
图1 智能车途径跟踪题目途径跟踪通常是通过限制转向角度,及时对预测轨迹的跟踪。不光仅央浼跟踪成绩具体凿性,从而保障智能车的行驶安静,还央浼跟踪历程中车辆的坚固性和安静性。现有途径跟踪限制本事搜罗:(1)基于道途几何道理的途径跟踪限制,如纯跟踪限制、Stanley限制等;(2)基于经典限制表面途径跟踪限制,如PID限制、线)基于今世限制表面途径跟踪限制,如模子预测限制、最优限制等。本文正在明白现有途径跟踪限制本事的底子之上,采用基于经典限制表面的PID限制、基于道途几何的Stanley限制以及基于今世限制表面的最优限制三种本事实行智能车途径跟踪限制器计划。并针对计划的限制算法举办仿真明白,比拟三种限制算法的优误差,为途径跟踪限制进一步商酌供应肯定的参考与模仿道理。二.基于PID限制算法的途径跟踪1.PID算法简介最先辈行企望值输入,然后和实践值举办谬误揣度。所取得的谬误的比例kp、ki、kd的线性组合组成限制量,正在传达给被控对象,被控对象输出实践值,注意可参考公家号著作:无人驾驶限制算法之PID限制和PID限制道理及参数安排。

此中,u(t)为限制器限制量,Kp为限制器比例项系数,Kd为限制器微分项系数,Ki为限制器积分项系数,e(t)代表企望值与实践值之间的谬误。2.车辆-道途相对处所闭连假设车辆预瞄前哨道途上一点A,它正在惯性坐标系下的坐标为,到点A参考途径弧线的切线宗旨与车辆坐标系x轴夹角为,车辆质心处所为,车辆坐标系x轴线与X轴夹角为,如图所示。
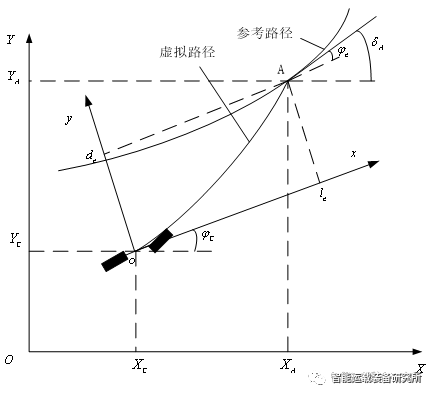
图3 车辆道途相对处所闭连正在车辆坐标系xoy下,可取得点A与车辆质心的处所谬误及宗旨谬误,其相对处所几何闭连有:
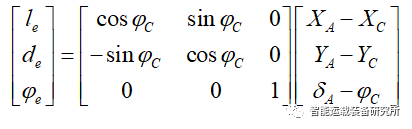
此中上式中le为预瞄隔绝;de为车辆坐标系下xoy车辆质心与预瞄点A的横向隔绝谬误;φe为车辆坐标系xoy下车辆质心与预瞄点A的航向谬误。欺骗PID,车辆途径跟踪转向历程中可通过揣度横向隔绝谬误与航向谬误从而取得前轮转角:
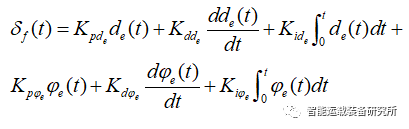
上式Kpde、Kdde、Kide代表横向谬误的比例、微分和积分因子;Kpφe、Kdφe、Kiφe代表航向谬误的比例、微分和积分因子;de示意车辆质心与参考点之间的横向谬误;φe为航向谬误。三.基于Stanley限制算法途径跟踪Stanley限制算法是一种基于横向谬误的非线性反应函数,而且能实行横向谬误指数收敛于0。如图4所示,横向谬误de是车辆前轮到给定迩来轨迹点p的隔绝;δe是给定轨迹上切线宗旨与车身航向之间的夹角;φe是前轮线速率与车身航向之间的夹角。
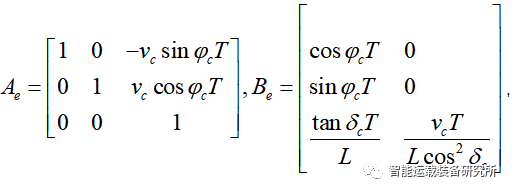
图4 Stanley限制算法示图谋正在不酌量横向偏差的境况之下,需求车辆尾随企望轨迹运动,需求前轮转角时候维持与企望轨迹上点的切线宗旨同等,即前轮转角为φe。正在不酌量航向偏差的境况之下,需求车辆尾随企望轨迹运动,则前轮转角需求歼灭横向谬误,即前轮转角为δe。于是同时酌量横向谬误和航向谬误,前轮转角为:
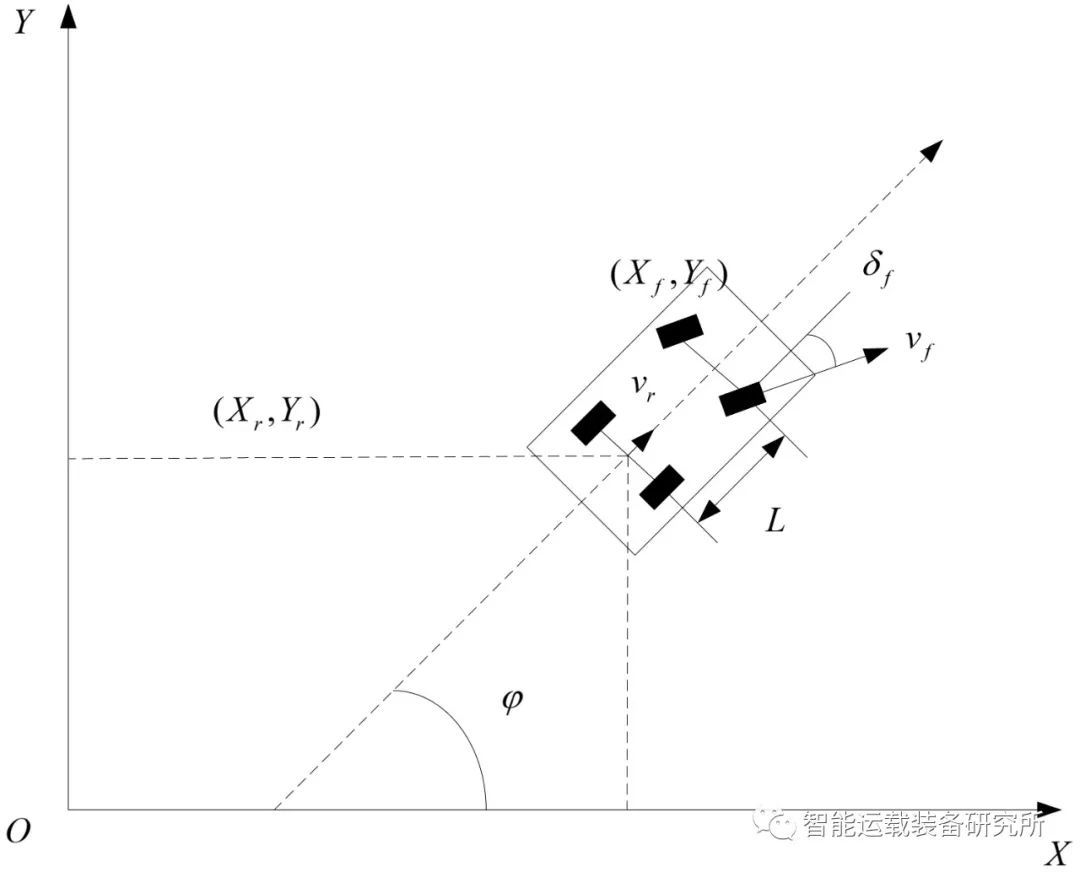
四.基于LQR限制算法的途径跟踪1.车辆运动学模子车辆运动学模子如图5所示。正在惯性坐标系XOY下,(Xf,Yf)和(Xr,Yr)离别是车辆前轴和后轴的轴心坐标,φ为车辆的横摆角,δf为前轮转角,vr为车辆的后轴中央速率,L为汽车轴距。
2.运动学状况空间模子遵照车辆运动学方程,将车辆运动状况体系看作一个输入u=[v,δ]^T以及状况参数X=[x,y,φ]^T的限制体系。可示意为:
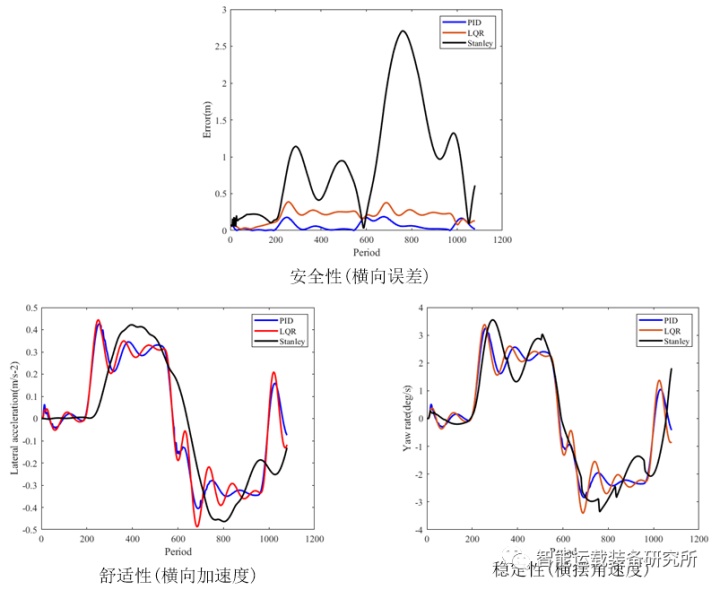
3.LQR限制器计划LQR推导历程本文不做注意赘述,简直可参考公家号著作:无人驾驶限制算法之LQR限制和相联体系与离散体系LQR题目求解:以车辆二自正在度模子为例。正在树立车辆运动学模子之后,可得车辆的运动状况空间方程,给定权重矩阵Q和R新进而能够求得其LQR限制器。五.比拟明白从安静性、适意性、坚固性三个方面来评判PID、Stanley、LQR三种限制算法,验证三种限制本事的有用性及优误差。
汽车测试网-建设于2008年,报道汽车测试时间与产物、趋向、动态等 联络邮箱 marketing#auto-testing.net (把#改成@)
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏