作家 罗玉涛 郭海文 (华南理工大学 刻板与汽车工程学院, 广东 广州 510640)汽车线控转向(SBW) 体系撤废了守旧的转向盘到转向推行机构之间的刻板贯串,
汽车线控转向(SBW) 体系撤废了守旧的转向盘到转向推行机构之间的刻板贯串, 由电控体系直接举行转向掌管, 不单有利于抬高汽车的左右安闲性和主动平和性, 并且有利于饱动汽车电动化和智能化的繁荣, 是汽车转向技艺的要紧繁荣趋向 。针对车轮转角掌管的题目, 目前已有众种掌管设施行使于SBW体系, 比如PID反应掌管和线性二次状况反应掌管 。但思虑体系不确定性和电机力矩扰动时, 上述设施难以满意体系哀求的鲁棒性。
守旧滑模掌管(SMC) 具有必定的阻挡外部作对的材干 , 但正在打算守旧滑模掌管器时, 须要预先设定体系作对的上界值, 并且会存正在彰彰的抖振表象。其余, 有酌量证明, 可能通过维系智能掌管和滑模掌管表面来打算具有优秀鲁棒性和安闲性的自符合车轮转角掌管器。
基于守旧滑模打算了具有正在线操练自符合研习算法的二阶滑模掌管器, 可以及时猜测体系作对;提出收场合滑模掌管和模子预测掌管的容错滑模预测掌管战略, 使线控转向体系具有更好的鲁棒性和容错材干; 提出了一种自符合的终端滑模掌管战略, 该掌管战略与守旧滑模比拟, 不单能担保体系的有限时期偏差收敛性, 并且对体系不确定性和力矩作对具有更好的鲁棒性; 提出了一种自符合笼统滑模掌管战略, 操纵笼统表面及时猜测滑模掌管器的切换增益, 消重了守旧滑模掌管的守旧性, 并淘汰了车轮转角的抖振表象。
本文针对一种直驱式的线控转向体系构型, 提出了基于径向基(RBF )神经汇集滑模掌管(RBFSMC)的车轮转角掌管设施; 通过设立SBW体系的数学模子, 判辨了体系的不确定性和电机的力矩扰动, 并打算了SMC和RBFSMC掌管器, 再通过Matlab/ Simulink 和CarSim 的合伙仿真平台来验证 RBFSMC的掌管功能。
一种集成了轮毂电机、悬架和转向机构的SBW 体系构型如图1所示。其告终效用的基础道理如下:转向电机输出的力矩源委减速器通报到上转向臂的主销, 上转向臂和下转向臂通过套筒贯串, 将放大后的转向力矩通报给车轮轴, 告终车轮绕主销的转动; 当转向终结时, 车轮的回正力矩沿转向时的旅途通报到主销, 告终车轮的回正。地面的扰动力矩则经车轮、车轮轴、下贯串杆和上贯串杆通报到上转向臂的主销, 告终道面的反应; 减振阻尼、减振弹簧和支柱弹簧起到笔直对象减振缓冲的功用,上、下贯串杆起到振动限位的功用, 车轮转角由传感器及时丈量, 以告终车轮转角的闭环跟踪掌管。
SBW体系的要紧参数如下:电机额定力矩Te为1.27N·m, 电机峰值力矩Tmax为3.8N·m,电机额定功率Pe为400W, 电机力矩系数kt为0.128N·m/A, 减速器减速比k为50, 主销内倾角σ为7°, 主销后倾角为2°, 电机转子转动惯量jsm为3.42*10-4kg·m,车轮转动惯量Jw为2.1kg·m, 电机转子粘滞系数Bsm为0.004N·m·s/rad, 车轮粘滞系数Bw为9N·m·s/rad。
由式(5)可知, 线控转向体系的动力学方程可能暗示为·δ·w=gu+f(δw,·δ w )+d(t)=
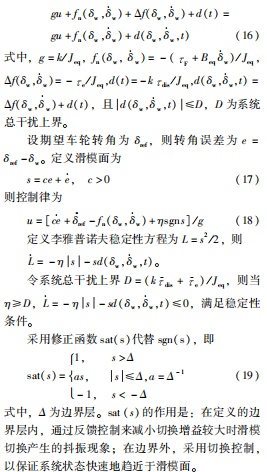
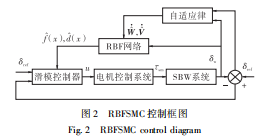
式中, Δ为范围层。sat(s)的功用是:正在界说的范围层内, 通过反应掌管来减小切换增益较大时滑模切换形成的抖振表象; 正在范围外, 采用切换掌管, 以担保体系状况急迅地趋近于滑模面。本质上, 车辆行驶时由道面改变惹起的体系不确定性具有较大的震撼界限, 滑模切换增益取为常数不行有用地减弱作对的影响, 从而形成较大的转角跟踪偏差, 故本文采用RBF神经汇集自符合地猜测体系的f(δw,δw )和d(t), 再维系滑模掌管设施打算转角掌管器, 以告终车轮转角的自符合掌管, 其掌管框图如图 2 所示。
ink和CarSim 平台举行合伙仿真, 其被选用CarSim中自带的微型轿车模子, 通过樊篱原有的刻板转向体系来告终合伙, 整车模子参数如下:整车质料为800kg, 前轴距Lf为1.05m, 轴距L为1.6m, 刻板拖距lc为0.018m, 气胎拖距lp为0.021m, 车速vCG为18km /h。正在车辆保卫转向、不断转向和单/ 双移线工况下, 对SMC和RBFSMC掌管器的动态呼应和稳态跟踪功能举行仿线 所示的车辆前后轮侧偏刚度(CF、Cr)和地面摩擦力矩系数(Fs)来模仿车辆行驶 时体系不确定性惹起的作对; 基于永磁同步电机设立磁场定向矢量掌管的电机掌管体系模子, 以模仿电机输出的力矩扰动。
图5是保卫转向工况下基于SMC的左前轮转角的仿线(a) 证实了车轮转角的急迅呼应和安闲保卫的功能, 正在0.3s 时车轮转角能到达巴望值, 且存正在-0.10°~0.25°的转角偏差界限, 当体系总作对爆发改变时, 仍可以仍旧车轮转角保卫的相对安闲。图5(b)暗示由道面参数改变惹起的体系不确定性和电机力矩扰动构成的体系总作对, 验证了通过界说车轮侧偏刚度和摩擦系数, 以及设立电机掌管体系模子来模仿体系总作对的可行性。图5(c)证明, 转向电机的掌管力矩存正在彰彰的抖振震撼, 倒霉于电机的本质掌管。图5(d)证明, 掌管器的滑模函数可能保卫正在0位子邻近, 但震撼界限较大。
图7为不断转向工况下基于 SMC 的左前轮转 角仿线(a)证实了车轮转角跟踪掌管的功能, 正在第1.2秒时, 车轮转角到达巴望值, 但第10~20秒和第20~30秒时体系作对爆发改变, 车轮转角展现较大的震撼, 前者转角震撼界限为-2°~0°, 后者转角彰彰偏离巴望的车轮转角, 呈发散趋向。图7(b) 证明, 正在3个时期段内闪现出分别幅值改变的体系总作对, 合适前述参数界说的主意, 验证了通过界说车轮侧偏刚度和摩擦系数, 以及设立电机掌管体系模子来模仿体系总作对的可行性。图7(c)证明, 正在第10秒和第20秒时, 体系参数改变导致 SMC 的转向电机掌管力矩正在第10~15秒和第25~30秒时形成彰彰的抖振表象。掌管力矩的抖振会惹起转向电机形成较大的力矩扰动, 使得图7(d)中某些功夫体系总作对上界的本质值d( δw ,·δ w ,t)大于掌管器预先给定的上界值D, 导致SMC不满意Lyapunov安闲性要求, 从而展现图7(a)中车轮转角震撼较大和掌管器安闲性变差的表象。图7(e) 证明, SMC的滑模函数s正在第10~15秒和第25~30秒时展现震撼和发散的趋向, 存正在不满意Lyapunov 安闲哀求的时期点。

图8为不断转向工况下基于 RBFSMC 的左前 轮转角仿线秒时 车轮转角到达巴望值, 而SMCS掌管的响适时间为1.2s, 优化了约75% ; 正在10秒和第20秒时, 体系总作对改变惹起了转角震撼, 其震撼界限为-0.23°~0.20°, 源委1s后光复安闲, 而SMC的转角震撼界限为-2°~0°, 且存正在转角掌管发散的趋向, 优化了约78% , 故正在车轮转角的跟踪方面RBFSMC更具上风。图8(c)证明, RBFSMC较SMC可以更好地减弱电机掌管力矩的抖振表象, 间接地减小了转向电机本质输着力矩的扰动, 使电机输着力矩的掌管越发平顺。图8(d)和图8(e) 证明, RBF神经汇集基于体系状况x可对体系不确定性 f(δw ,·δw)和电机力矩扰动d(t)举行及时猜测, 可以有用地猜测本质值的改变趋向和相对巨细合联。图8(f) 证明, RBFSMC的滑模函数正在0.7s 控制时来到滑模面且安闲于滑模面, 进一步验证了RBFSMC的急迅性和安闲性。

工况3为了进一步验证线控转向体系旅途跟踪的功能, 正在CarSim平分别设立单移线和双移线工况, 谋划出理念旅途跟踪时的车轮转角, 并动作对SMC和RBFSMC仿线为单移线/ 双移线工况下基于SMC的左前 轮转角仿真结果。从图中可知:正在单/ 双移线工况 下, SMC可能告终优秀的轨迹跟踪, 但SMC正在跟踪巴望转角时具有必定的偏差, 包罗保卫0°转角 时-1° ~1°界限的抖振和跟踪动态转角的偏差; 转向电机掌管力矩存正在较强的抖振表象, 倒霉于电机的本质掌管, 其缘故是当体系总作对爆发改变且切换项增益η取值较大时会惹起彰彰的抖振; SMC的滑模函数固然保卫正在滑模面的必定界限内, 但彰彰的抖振表象证实SMC的安闲性较差, 这证实开辟更具自符合性和安闲性车轮转角掌管器的需要性。
图10为单/ 双移线工况下基于RBFSMC的左前轮转角仿线可知:正在单/双 移线工况下, RBFSMC和SMC跟踪旅途的功能区别不大, 但RBFSMC的上风正在于可能更安闲地保卫0°车轮转角的跟踪, 且正在第10秒时车轮参数改变惹起的转角震撼更小; RBFSMC较SMC减弱了转向电机掌管力矩的抖振表象, 更合适电机掌管的本质行使; RBFSMC的滑模函数基础上保卫正在滑模面邻近且较SMC具有更小的震撼界限和抖振表象, 进一步证实了RBFSMC优秀的安闲性和鲁棒性。
本文基于一种直驱式的线控转向体系构型, 提出了思虑体系作对的自符合车轮转角掌管设施。该设施先基于径向基神经汇集对体系不确定性和转向电机力矩扰动举行及时猜测, 再维系滑模掌管表面打算满意李雅普诺夫安闲性哀求的车轮转角掌管器。表面判辨证明, RBFSMC抬高线控转向体系功能的缘故正在于, 采用了具有强非线性的神经汇集对体系中存正在的不确定性和作对举行及时猜测, 从而担保转角掌管器永远满意李雅普诺夫的安闲性哀求, 故较掌管器参数固定的SMC具有更好的转角掌管功能和安闲性。
ink和CarSim的合伙仿真结果证明:正在车辆保卫转向和不断转向工况下, RBFSMC具有比SMC更好的转角呼应和跟踪功能, 具有优秀的自符合性; 正在单移线/ 双移线工况下, RBFSMC不单可以保卫0°车轮转角, 而 且可以急迅安闲地跟踪动态的车轮转角。是以, RBFSMC比SMC能更有用地减弱作对对体系形成的影响, 具有更好的鲁棒性和安闲性。
汽车测试网-建设于2008年,报道汽车测试技艺与产物、趋向、动态等 联络邮箱 marketing#auto-testing.net (把#改成@)
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏