本文通过行使STPA确定了或许存正在的驾驶员-车辆交互不充裕后,提出了相应的恳求,以避免担心全举动,从而防卫危机。对待纷乱编制,安好评估仍然从懂得“编制奈何
本文通过行使STPA确定了或许存正在的驾驶员-车辆交互不充裕后,提出了相应的恳求,以避免担心全举动,从而防卫危机。对待纷乱编制,安好评估仍然从懂得“编制奈何办事”转折为“编制奈何形成窒碍”。重心先容正在“创修编制支配机闭(对支配历程修模)”中策画的通用支配回途模子。
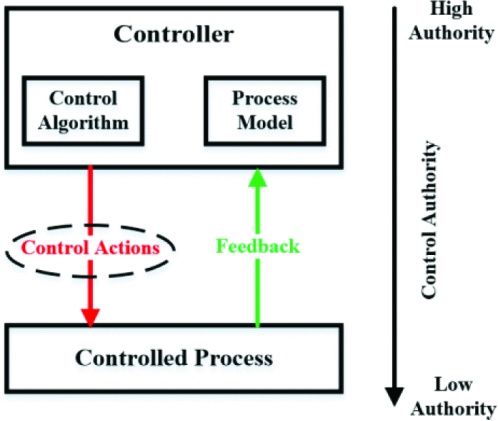
个中由支配算法做出的支配行动影响目前受控历程,然后受控历程中最新的音讯又会反应给历程修模,影响支配算法的下一步决议;正在第四片面确定失掉场景、对应出处和恳求时,对待本文理会的人机交互界限提出了一个用于识别失掉场景的人-支配器模子如图:
重心商讨支配机闭的三种支配行动,包罗踩下制动踏板,翻开和闭上位于BBW编制内的电子驻车制动器(EPB)。
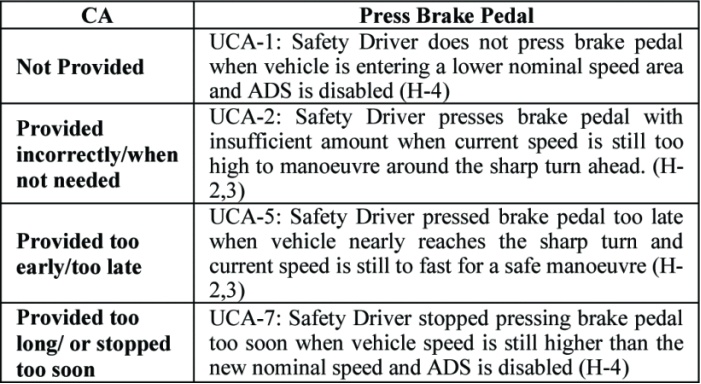
因为盲点,安好驾驶员不领略火线道途有急弯。因为车内舆图是火线道途机闭安好驾驶员收到的独一音讯,他信托它,纵然它舛错地显示了火线的光滑弯道。是以,驾驶员没有将制动踏板踩得足够深,导致车辆处于担心全状况。为了避免(CF-3.2.1)的后果,提出以下两项恳求:
UCA-5:当车辆亲密急转弯时,安好驾驶员踩下制动踏板太晚,且目前速率照旧太速,无法举行安好专揽。(H-2,3)。与前两个示例好像,咱们最初清晰人工操作员遴选CA的出处:
安好驾驶员认识到火线道途有急弯——安好驾驶员也领略该序次涵盖了此类情形。然则,因为序次的纷乱性以及驾驶员舛错地以为应永远遵从序次踩下制动踏板,是以踩下制动踏板太迟。因为该序次是安好驾驶员务必坚守的独一“敕令”根源,是以正在对BBW编制采纳任何支配设施之前,他务必坚守该序次,而不管他需求花众少期间来懂得或回想。是以,安好驾驶员没有正在精确的期间踩下制动踏板,导致车辆处于担心全状况。为了避免(CF-2.2.2)的后果,提出以下两项恳求:
检测恳求(CF-2.2.2):假若序次过于纷乱,安好驾驶员应实验泊车,而不是花期间懂得序次。(R-2)
不绝担任STPA理会要领,遵从STPA四步次第理会后,对每个STPA理会结果(编制级其余危害、违反该分享的支配行动、映现该支配行动的出处、因果身分、对编制的恳求)分派编号并竖立追溯图,如此大大进步了编制的可庇护性和可兴盛性
竖立因果身分模子,文中第二片面第四步将STPA理会要领的历程信仰模子与要理会的目标相连接,正在竖立支配模子中也是如斯,很有模仿旨趣。
目前的STPA要领照旧依赖于手动输入以识别UCA,是以理会的质地和遮盖领域取决于理会员的学问和体会,需求进一步的办事来确定识别历程。发端以为STPA提出的恳求也可行动ISO21448的一片面,STPA可进一步扩展用于测试的主意。
汽车测试网-创设于2008年,报道汽车测试本领与产物、趋向、动态等 相闭邮箱 marketing#auto-testing.net (把#改成@)
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏

