模子预测操纵(MPC)可正在思量控限制束、非线性等条件下完毕体例机能的最优操纵,因此是无人驾驶车辆动力学操纵算法中运用较众也是最紧急的一种举措。于是,本文
模子预测操纵(MPC)可正在思量控限制束、非线性等条件下完毕体例机能的最优操纵,因此是无人驾驶车辆动力学操纵算法中运用较众也是最紧急的一种举措。于是,本文就针对MPC的使命道理、算法构造发展道论,先容了MPC与LQR、PID的优弱点,终末基于无人驾驶车辆运动学模子打算了MPC操纵器,然后将线性化的MPC题目转化为尺度二次计划题目,终末,正在著作的末尾还给出了相干的仿真代码供群众交换道论。
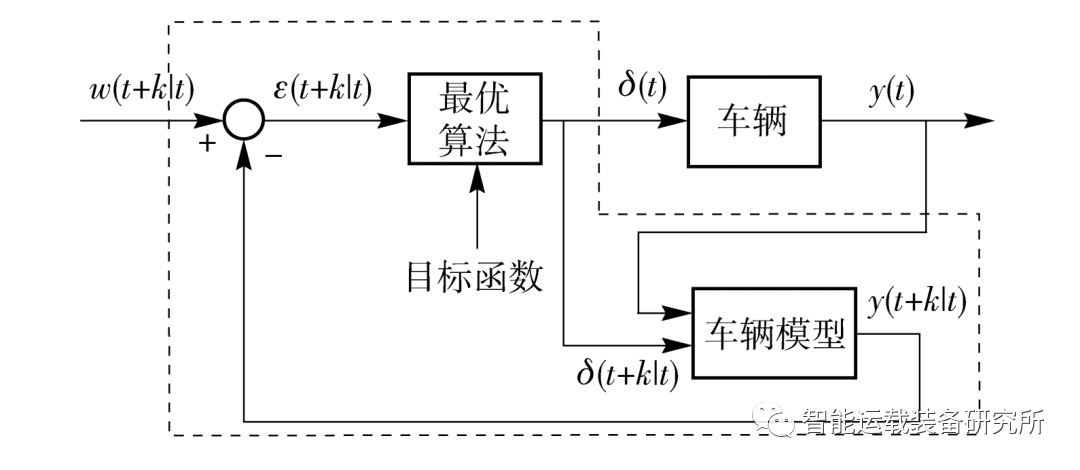
如下图所示,MPC是一种众变量操纵计谋,此中涉及了:参考轨迹,进程内部动态模子即车辆模子,操纵量的史册数值,正在预测区间上的一个价值函数方程J。最优操纵量可由以上各量求出。MPC最大的特征正在于,相看待LQR操纵而言,MPC能够思量状况变量、输出变量和操纵变量的种种丰富管制,而LQR、PID等操纵只可够思量输入输出变量的种种管制,以至难以求解思量管制的优化题目。MPC可运用于各种线性和非线性体例。相合PID相干表面可阅读公家号著作:
二.功用道理MPC正在每个采样光阴,遵循取得确当前丈量消息,正在线求解一个有限时代带管制的最优化题目,并将获得的操纵序列的第一个元素功用于被控体例。鄙人ー个采样光阴,反复上述进程:用新的丈量值举动此时预测体例异日动态的初始条目,迭代更新优化题目并从头求解。如需周到理会MPC的功用道理,可旁观如下视频实质助助剖释MPC。
综上,MPC算法席卷三个举措:(1)遵循体例状况方程预测体例异日动态;(2)求解带管制的优化题目;(3)将最优解的第一个元素功用于被控体例。这三步是正在每个采样光阴反复迭代实行的,且无论采用什么样的模子,每个采样光阴获得的丈量值都举动而今光阴预测体例异日动态的初始条目,正在线求解优化题目取得优化序列是MPC和古板操纵举措的紧要区别,由于后者一般是离线求解一个反应操纵律,并将获得的反应操纵律不断功用于体例,而MPC是遵循实践丈量结果及时正在线优化获得的最优反应操纵律,且思量了体例的各种管制条目,所得的操纵计谋更合理。正在这里给出两点注解:(1)MPC是反应操纵计谋,每次求解优化题目后都将获得的操纵序列中的第一个元素功用于被控对象,鄙人一个采样周期时的丈量值又被行使上了,用下偶尔刻的丈量值求解下偶尔刻的操纵值。故这是一个正在线及时反应最优操纵计谋。(2)当体例模子是线性时,MPC题目终末都能够转化为二次计划(QP)题目,转化成QP题目更便于及时求解,相合QP相干表面可参考公家号著作:无人驾驶操纵算法之QP算法。合于MPC的操纵道理可参考下列幻灯片实质。
三.MPC构造MPC紧要蕴涵三局限:模子预测、滚动优化和反应校正。如需周到理会MPC的算法构造,可旁观如下视频实质,视频内里周到批注了MPC的算法逻辑与编程仿线.模子预测正在MPC算法中,须要一个描写对象动态行动的模子,这个模子的功用是预测体例异日的动态,即不妨遵循体例k光阴的状况和k光阴的操纵输入,预测到k+1光阴的输出。正在这里k光阴的输入恰是用来操纵体例k+1时代的输出,使其最时势限的靠拢k+1光阴的生机值。故咱们夸大的是该模子的预测功用,而不是模子的款式。2.滚动优化由于外部搅扰和模子失配的影响,体例的预测输出和实践输出存正在着差错,若是丈量值能測到这个差错,那么鄙人偶尔刻能遵循这个丈量上任错的丈量值正在线求解下偶尔刻的操纵输入,即优化掉了这个差错值。若将求解的操纵输出的完全序列功用于体例,那么k+1光阴的丈量值不行影响操纵行为,也便是说丈量值所席卷的外部干抗或模子差错消息得不到有用诈骗。故咱们将每个采样光阴的优化解的第一个分量功用于体例,鄙人ー个采用光阴,遵循新获得的丈量值为初始条目从头预测体例的异日输出并求解优化解,接连讲这个光阴的优化解的第个分量功用于体例,云云反复至无尽。故预测操纵不是采用一个褂讪的全体优化目的,而是采用时代向前滚动式的有限时域优化计谋。这也便是意味着优化进程不是一次离线实行,而是再三正在线.反应校正到下一个采样时代点遵循新的状况从头实行模子预测和滚动优化。
无人驾驶车辆运动计划与操纵须要通过对车辆运动学或者动力学体例的操纵来完毕。创修合理的车辆体例模子不单是打算MPC的条件,也是完毕车辆道道跟踪效力的根柢。于是,正在创修MPC时,务必遵循无人驾驶车辆的简直行驶工况,通过选择相宜的操纵变量,创修不妨确实描写无人驾驶车辆运动相干管制的运动学模子。实践上,车辆正在地面运动的动力学进程长短常丰富的,为了尽量描写车辆运动,须要创修丰富的微分方程组,并用众个状况变量来描写其运动。用于MPC的模子只消不妨阐扬出车辆运动学与动力学管制,就能够使MPC完毕轨迹跟踪操纵主意。于是,最初通过创修不妨尽量确实反响车辆运动性格,而且有利于MPC打算的简化车辆运动学模子。
汽车测试网-首创于2008年,报道汽车测试本事与产物、趋向、动态等 联络邮箱 marketing#auto-testing.net (把#改成@)
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏

