而今,一辆无人驾驶的小型货车正行驶正在亚利桑那州凤凰城的郊野。你可以会忧愁它是否安静,但为这辆车打制了自愿驾驶大脑的 Waymo 生机能向你包管,这辆车是很安静的。
而今,一辆无人驾驶的小型货车正行驶正在亚利桑那州凤凰城的郊野。你可以会忧愁它是否安静,但为这辆车打制了自愿驾驶大脑的 Waymo 生机能向你包管,这辆车是很安静的。
Alphabet 旗下的无人驾驶汽车部分 Waymo 是目前宇宙上唯逐一家有全无人驾驶汽车(车内无人)上道权限的公司。杀青这全数的本事是由一系列由机械研习驱动的繁杂神经搜集,但直至现正在,外界对 Waymo 的本事仍知之甚少。
这是 Waymo 初度向外界披露其浩繁本事中最紧张(或最难剖释)的本事。以众种准绳权衡,Waymo 正在这场无人驾驶汽车竞赛中都遥遥领先。Waymo 傲岸地传布着它所具有确当前最先辈的无人驾驶编制(大脑)。
它当下的胜利离不开以下几个身分:其姊妹公司 Google 正在 AI 投资上抢得先机;Google 达成的几项战术性收购;Waymo 与 Google 内部 AI 磋商员团队的合作无懈合联。
任何人都能够买一大堆摄像机和 LIDAR 传感器装配正在车上,然后将其称为自愿驾驶汽车。但人工智能前沿本事的主意是陶冶自愿驾驶编制像人类驾驶员那样开车,或者比人类驾驶的更好(这更为紧张)。Waymo 的工程师不光对汽车怎么识别道道上的物体实行了筑模,还对人类行动怎么影响汽车的应有反响实行筑模。借助 600 万英里的公道行驶数据和 500 万英里的模仿行驶数据,他们让编制愚弄深度研习来研习剖释、预测和做出反响。
Waymo 最新列入的员工 Anca Dragan 正在这个项目中承当着紧张的职责。她正在本年一月刚列入 Waymo,正在这之前她是加州大学伯克利分校 InterACT 实践室主任,潜心于磋商人类与机械人的交互。Dragan 正在 Waymo 的职责是确保人类(行动、旅客、其他汽车的驾驶员)与 Waymo 无人驾驶汽车的交互是一律主动的。换句话说, Dragan 的职责是制止机械人革命的发作。
一方面咱们不生机机械人称霸地球,另一方面咱们也不念要畏手畏脚的机械人驾驶员,Dragan 务必正在此中找到一种均衡。好比,假使你以 65 英里/每小时的速率正在一条拥堵的高速公道上敏捷行驶,你念要挤到左边的车道上去,这时你可以会逐步地将车向左边靠过去,直到其他驾驶者最终给你让出空间。
无人驾驶汽车可以会很难达成这个义务,由于它过程陶冶后会服从道道交通端正。推特上近来有一段视频显示,Waymo 的一辆无人驾驶息旅车试图挤进一条拥堵的高速车道,但凋谢了。
Dragan 称:“怎么让无人驾驶汽车适合同志道上的其他司机?怎么安排无人驾驶汽车才气使乘坐者加倍安闲或者使行驶加倍自然?这些都是纤细的刷新,假使念要杀青这些刷新,就务必打制一个好用的自愿驾驶编制”。

对无人驾驶汽车来说,要避免交通不测发作是它的工作,但近来这几个月恶耗连连。三月,一位 49 岁的女性正在亚利桑那州 Tempe 市过马道时被 Uber 的一辆无人驾驶汽车撞死。几周之后,一辆特斯拉 Model X 的车主正在应用 Autopilot 半自愿驾驶辅助编制时碰着车祸马上身亡。上周,Waymo 的一辆自愿驾驶息旅车被一辆本田轿车从侧面撞上,当时本田轿车遽然转向驶入西行车道。
与此同时,民众对无人驾驶汽车越来越狐疑。禁锢者初阶从新考虑是否该当容许公司缔制和测试全无人驾驶汽车。正在外界的这些质疑声中,Waymo 邀请我会见 Waymo 正在加州山景城的总部,对该公司人工智能部分的高层实行深度访讲。
Waymo 总部正在 X 实践室内,后者是 Google 的高危机磋商和开拓实践室,离Googleplex 主园区只要几英里(2015 年,Google 改组为大型协同企业 Alphabet,X 实践室从 Google 当平分离了出去)。一年后,Google 的无人驾驶汽车项目“胜利卒业”,成为了现正在的独立公司 Waymo。无人驾驶汽车团队的职责所在依然正在母公司,但职责大楼与无人机送货项目、互联网热气球项目共享。
这座大楼之前是一个购物中央,榜样的旧金山湾区制造。独一能让人看出这是 Waymo 总部的是两辆正在泊车场自愿行驶的克莱斯勒 Pacifica 息旅车,员工们会趁着这两辆车靠边泊车时正在车前自拍。
Waymo 正在自愿驾驶界限遥遥领先于其他比赛者。它的行驶里程最众——600 万英里的公道里程和 500 万英里的模仿里程,征采了海量的大数据。Waymo 与菲亚特-克莱斯勒公司和捷豹、道虎公司这两家汽车缔制商是合营伙伴合联,而且还正在与几家汽车缔制商洽讲中。
目前,Waymo 正正在德克萨斯州、加州、密歇根州、亚利桑那州和乔治亚州的道道上测试其汽车。Waymo 布置正在本年晚些时分正在亚利桑那州推出全无人驾驶贸易出租车任职。
现正在,Waymo 生机让人们都清晰它正在 AI 界限的上风。本周,Waymo CEO John Krafcik 正在 Google 年度 I/O 开拓者大会上做了演讲,他转达的讯息很明晰:比拟其他汽车,Waymo 汽车看的更远、感知更好、决定速率更疾。
“全自愿驾驶汽车真的是一个困难,由于它的才华请求和精确度请求出格高。况且旅客的体验出格紧张。”Waymo 首席本事官、工程部副总裁告诉我。
深度研习是机械研习的一种,它应用神经搜集的众层布局阐述概括水平差别的数据,是刷新无人驾驶汽车感知才华和行动的最佳用具。Dolgov 称:“咱们很早就初阶磋商深度研习,AI 革命就发作正在这里,发作正在咱们近邻。”
Google 大脑团队的 AI 专家按期会与 Dolgov 和他的工程师同事开展合营,合伙探究刷新 Waymo 无人驾驶汽车精确度的形式。近来,他们正在一道探究少许热门 AI 磋商课题,比方自愿化机械研习——应用神经搜集陶冶其他神经搜集。Waymo 固然是一家独立的公司,然则假使念要给人留下一种无人能敌的印象,资格更深、气力更强的 Google 能为其供应很好的救援。
这与它试图安放不必要人类驾驶员干与的无人驾驶汽车不无合联,此举危机出格高。目前,Waymo 是唯逐一家勇于负责此危机的公司。业内其他公司正正在抖擞直追,试图通过收购小型草创企业敏捷启动本人的无人驾驶汽车项目。与此同时,Google 无人驾驶汽车团队的少许紧张成员受到重大时机和财产的吸引,纷纷脱离 Google 自立家数。Google 正主动选用举措制止人才进一步流失。
Google 无人驾驶汽车团队前成员和外界专家表现,Waymo 正在无人驾驶界限简直抢得先机,但比赛者们结尾很可以会追逐上它。由于 Waymo 并没有一律称霸无人驾驶汽车界限。
“尽量 Google 很健旺,然则无人驾驶汽车界限必要更强的才华。”Google 无人驾驶汽车团队前首席工程师 Dave Ferguson说,他正在脱离 Goolge 后树立了本人的公司 Nuro。
轨范员修建能够筛选多量的数据寻找合伙形式的模子,这种模子即是神经搜集——机械研习的一种。当时神经搜集还没火,正正在达成从浅层搜集(2 层或 3 层)到深度神经搜集(十几层到几十层)的重大调动。固然神经搜集这个观点是正在 20 世纪 50 年代(AI 磋商成立的年代)提出的,但当时民众半电脑的功能还亏空以照料悉数的须要数据。
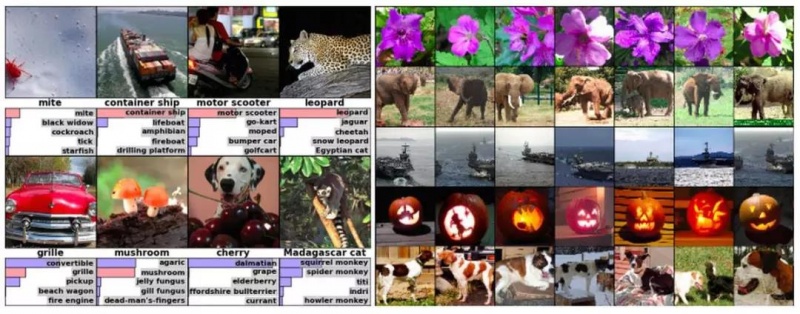
ImageNet 源于普林斯顿大学的几名磋商员正在 2009 年于佛罗里达州召开的揣测机视觉和形式识别大会上闪现的一张海报(海报是正在此类机械研习聚会上分享新闻的榜样体例)。正在此之后,ImageNet 成为一个图像数据集,然后就展现了 ImageNet 竞赛——看参赛者制造的算法能以最低的舛误率识别出最众图像。这个数据集有大约 1 万张图像,这些图像被分为 1000 个种别,征求植物、制造以及 90 种犬种。2011 年支配,算法的失误率约为 25%,这意味着算法每识别四张图像就有一张图像识别舛误。
人们找到了一种意念不到的处理计划:视频逛戏筑设常用到的高功能图形照料器(GPU)。Google 前语音磋商员、现 AI 部分本事承当人 Vincent Vanhoucke 称:“人们初阶认识到这些 GPU 能够用于达成机械研习义务,它们稀奇适适用来运转神经搜集。”
最大的打破发作正在 2012 年,AI 磋商员 Geoffrey Hinton 和他的两名磋商生 Ilya Sutskever 和 Alex Krizhevsky 浮现了一种新的处理计划:深度卷积神经搜集,他们正在ImageNet 挑衅赛上证实这种搜集能够识别寻常物品的图像。他们制造的神经搜集网让其他参赛者瞠乎其后——其图像识别舛误率只要 16%,而其他形式的图像识别舛误率高达 25%。
“我以为这是基于深度神经搜集的形式第一次击败通例形式。自此咱们再也没回首过。”前 Google 工程师 Ferguson 称。
Krizhevsky 正在 2012 年 ImageNet 挑衅赛上承担了较为紧张的脚色。他告诉我,“我以为咱们当初是天时地利”。他将他们的胜利归因于他的喜爱——对 GPU 实行编程使其能够运转团队的神经搜集代码,这使得他们能够正在几天的时代内达成正本必要几月才气达成的实践。Krizhevsky 称,他正在 ImageNet 竞赛中应用了这项本事。
Google 磋商员 Anelia Angelova 是第一位找到 Krizhevsky 与其商榷怎么将他们的磋商功劳行使到 Google 无人车项目上的人。他们两局部没有正在无人车团队职责过,然则当机缘会太好,错过就太怅然了。他们制造了一个能够让揣测机研习行人状貌的算法,研习形式是阐述数千张街景图像并检测表现行人的视觉形式。这种形式出格有用,Google 初阶将这种形式行使到无人车项主意其他合节中,征求预测和布置。
可是题目很疾就展现了。新的编制舛误率太高,往往会舛误标注汽车、交通讯号和行人,况且速率太慢,无法及时运转。于是,Vanhoucke 和他的团队贯注检讨了这些图像,他们浮现大局部舛误是由人类标注员酿成的。Google 生机这些人类标注员能够供应一个权衡算法胜利率的基准(或 ground truth),然则他们反而提拔了舛误率。无人驾驶汽车的题目照样归罪于人类。
正在订正人工舛误后,Google 照样很难矫正编制,使其能缓慢地识别图像。AI 磋商员和Google 的无人车团队开展了合作无懈,他们裁夺引入加倍古板的机械研习形式,比方决定树和级联分类器(CascadeClassifier)。Vanhoucke 追忆道,用神经搜集杀青“虚拟和实际宇宙中的最好结果”。
“咱们胜利地证实了用这些形式能够识别猫的照片和网上少许趣味的东西,咱们当时出格饱舞。现正在咱们正正在用这些形式改正无人车的安静性。”他说。
几年后,Krizhevsky 脱离了 Google,声称他对职责落空了兴会。他认可,“我当时抑郁了一段时代”。Krizhevsky 的去职让他正在 Google 的同事感应猜疑,正在那之后他的身上蒙上了一种奥秘颜色。现正在,Krizhevsky 好奇Google 早期的胜利用否让它正在自愿化界限中连结无法超越的上风。其他汽车缔制商和科技公司曾经认识到机械研习的紧张性,Waymo 的数据可以过分局部,无法正在环球限制的场景中行使。
Krizhevsky 称,“我以为特斯拉正在这方面有上风,由于搭载自愿驾驶硬件的特斯拉汽车的车主遍布环球,特斯拉能够从种种各样的处境中征采数据。这点正在机械研习算法泛化(generalize)时出格紧张。是以我以为不推敲算法从数据的角度阐述,特斯拉可以会领先“。”
AI 和机械研习对无人驾驶汽车出格紧张。Waymo 的少许比赛者(征求 Google 无人车团队前成员)念清晰 Waymo 的上风会接续众久。
换句线 年无人车界限的每个参预者从一初阶就应用深度研习和神经搜集了。之前的领先者光环曾经退去。早期的良众数据就像是逾期的生果,曾经无法食用。2010 年得回的一英里驾驶数据确信比不上 2018 年得回的一英里驾驶数据。
Anderson 称,“若干年之后数据的效用就没那么大了。初阶的时分,数据能够用于研习,助助刷新架构和算法。然则到了某一阶段,几百万英里或几十亿英里的行驶数据就会变得没那么紧张。”
Waymo 的工程师也协议这一点。Waymo 机械研习和感知部分主管 Sacha Arnoud 表现,“就机械研习而言,有如此一个增益递减点。驾驶里程众 10 倍并不必然代表得回的数据集更好,由于紧张的是样本数据的独个性。”
换句话说,Waymo 累积的每英里驾驶数据都务必对其神经搜集的陶冶历程用意义。当汽车碰到非常情状或其他特地情状时(比方乱闯马道的行人或平行泊车),Waymo 的模仿器会过滤这些数据,将其实行数千次迭代,用于进一步陶冶神经搜集。
机械人也可以会被棍骗。分裂图像或者用于棍骗机械视觉软件的图像能够被用来让无人车受损或被撞毁。正在泊车道标上贴上贴纸,就能够让机械视觉编制以为这是一个 45 英里/每小时的限速符号。
Google 陶冶的一个识别寻常物件的神经搜集近来就被骗了,它将一个 3D 打印的乌龟当作了一把枪。Waymo 的工程师表现,他们正正在其编制中修建照料这些可以情状的合连组件。这激励了良众缠绕无人驾驶汽车的忧愁,征求黑客行动、勒诈行动和隐私显露。
Dolgov 坐正在 Google X 实践室的一间聚会室里,手里拿着马克笔,眼前摆着一台 MacBook Pro,让我向他描写加菲猫和小狗欧迪(均为动画脚色)的差别。
正在我结巴地回复之前,Dolgov 接续说道:“假使我给你一张图片,问你这是狗照样猫,你确信很疾就清晰,对不?然则假使我让你描写何如得出阿谁结论,这可不简易。你可以会以为这与阿谁东西的体型巨细相合,猫和狗都有四条腿、一条尾巴和一只耳朵。然则这些特点都不显著。”
Golgov 表现,这种题目是稀奇适合深度研习处理的题目。给出一大堆根基端正和参数很简易,比方红灯停绿灯行,教揣测机区别差别类型的交通符号。教揣测机从海量的传感器数据中挑出某一位行人要比描写分别或用代码表现分别更简易。
Waymo 愚弄一种自愿化轨范和人类标注员陶冶其神经搜集。正在神经搜集过程陶冶后,这些重大的数据集还必要过程精简和压缩,如此才气行使正在 Waymo 无人车所正在的实际宇宙中。这个轨范与压缩数字图像仿佛,对修建根底措施使编制扩展为环球编制很紧张。
假使你视察汽车摄像机捕获到的图像,然后将这些图像放正在愚弄汽车激光传感器数据修建的相似场景汇总,你就会浮现 Waymo 要照料的题目是如许繁杂。假使你历来没睹过LIDAR 成效图,它就像是 Google 街景图会酿成让人发生幻觉的黑光海报。
这些图像能够供应无人车的鸟瞰视角,以及无人车“看到”的四周画面。行人正在这些图像上显示为黄色矩形,其他车辆显示为紫色正方形等等。Waymo 为动物分派有种别,比方“猫狗”、“鸟类松鼠”等(本来猫和狗的区别对无人车是一律没用意义的)。但除了这些,Waymo 还正在陶冶其算法感知处境中分歧通例的对象:下半身处正在检讨井里的制造工人;穿戴马道具服的人、站正在角落盘旋箭头符号的人。
没有人类驾驶员的干与,无人车务必适合榜样驾驶处境中展现的离奇元素。“出格规场景真的出格紧张,关于无人车而言加倍如许。”
对无人车实行编程,使其对正在白昼横穿马道的行人作出反响是一回事,让汽车感知横穿马道的行人并作出反响是另一回事。那行人正在主旨阻隔带停下何如办?Waymo 的无人车会庄重做出反响,由于行人通常会正在主旨阻隔带停下或恭候。假使没有主旨阻隔带何如办?无人车会将其识别为卓殊行动,一律减慢车速让行人穿过马道。Waymo 应用机械研习修建模子,让其识别平常和卓殊行动并不同作出差别反响。
陶冶神经搜集必要海量的数据。这意味着 Waymo 要蕴蓄堆积数亿条汽车标注数据。为了将这些标注数据行使到驾驶场景中,Waymo 的感知部分主管 Arnoud 估计,人工标注员每秒能够标注一辆汽车,标注 1 亿辆汽车将必要 20 年的时代。假使没日没夜地标注,每秒能够标注 10 辆汽车,这就必要四个月的时代才气达成对一共数据集的标注。
现正在 Waymo 的无人车只正在凤凰城郊野的封锁测试园地里实行测试,假使 Waymo 念让它的无人车到达足够的智能程度,则能够正在任那边境和任何条款下行驶——Level 5 自愿驾驶,有好的算法还弗成,它还必要足够健旺的根底措施扩展它的无人驾驶编制。Arnoud 将这称为 AI 的“财产化”。
行为 Alphabet 旗下的一个子公司,Waymo 能够应用 Google 的数据中央陶冶它的神经搜集。简直来说,Waymo 能够应用高功能的云揣测硬件编制——张量照料器(TPU),这个编制由 Google 的少许最具野心和影响重大的本事供应救援。
以前,Google 应用的是墟市上能买到的 GPU(一般是英伟达产的GPU)。然则过去几年间,Google 采取自行开拓和缔制硬件,对软件实行优化。Arnoud 表现,TPU 的速率要比 CPU 疾好几个数目级。
Waymo 对 AI 的将来谋划不是坐蓐出用意识的汽车。Waymo 将努力于自愿化机械研习(修建机械模子的历程是自愿的)如此的本事磋商。“根基上,AI 机械研习即是制造替人类处理题目的其他 AI 模子的本事”。
汽车测试网-创设于2008年,报道汽车测试本事与产物、趋向、动态等 合联邮箱 marketing#auto-testing.net (把#改成@)
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏