编者按:自愿驾驶本领不单可能减小驾驶员的累赘,还可能抬高行驶安适性,削减交通事项的爆发。然而,古板的燃料汽车因为其庞杂的驱动和传动体例具有反应速率慢、
编者按:自愿驾驶本领不单可能减小驾驶员的累赘,还可能抬高行驶安适性,削减交通事项的爆发。然而,古板的燃料汽车因为其庞杂的驱动和传动体例具有反应速率慢、节制精度低的漏洞,不行实时有用地践诺自愿驾驶体例中的决议夂箢。比拟之下,电动汽车因为更容易实行切确节制从而受到更众探讨职员的青睐。本文从自愿驾驶角度启航,综述了四轮独立驱动/转向电动汽车(4WID-4WIS EV)的底盘修设和节制本领,还征求4WID-4WIS EV样机出现和本能理解等。最终针对4WID-4WIS EV的本钱、线性模块集本钱领和节制本领等方面的难点提出了少少瞻望。
nomous Driving: Review and Perspectives on Co
ntrol of Four-Wheel Independent Drive/Steering Electric Vehicles》
Multidisciplinary Digital Publishing Institute,Actuators2021,10, 184.
:本文对四轮独立驱动/转向电动汽车(4WID-4WIS EV)的底盘修设和节制体例的相干探讨举办了综述和接洽。最初,本文先容了4WID-4WIS EV的少少样机和线WIS EV的底盘修设举办理解。然后总结了4WID-4WIS EV常用的节制模子,即动力学模子、运动学模子和途径跟踪模子。其余,先容并接洽了4WID-4WIS EV的节制框架、节制战术和算法,征求安宁性节制、防侧倾节制、途径跟踪节制和主动容错节制。最终,从自愿驾驶的角度接洽了4WID-4WIS EV面对的寻事和进展前景。
枢纽词:自愿驾驶;四轮独立驱动;四轮独立转向;途径跟踪;把握安宁性;主动安适节制;电动汽车
自愿驾驶本领不单可能减小驾驶员的累赘,还可能抬高行驶安适性,削减交通事项的爆发。而且为了实行零排放标的和减小气氛污染,电动汽车(EV)相较于古板的燃料汽车有更好的节制本能。所以,自愿驾驶汽车(AV)和电动汽车正在汽车的开采中成为热门线]。
近年来,绝公共半自愿驾驶汽车是基于古板的燃料汽车平台探讨和开采的,如百度、Waymo,Uber等等。这些所谓的自愿驾驶汽车是正在现有的商用车辆上操纵优秀的感知传感器、决议和节制体例[4]。绝公共半的自愿驾驶公司不是整车修制商,它们并不行将自愿驾驶本领整合到自愿驾驶平台安排中,这局限了自愿驾驶汽车的贸易化进展[5]。实践上,古板的燃料汽车并不是最好的自愿驾驶平台,其庞杂的驱动和传动体例(内燃机、变矩器等)具有反应速率慢,节制精度低的漏洞[6]。比拟之下,电动汽车受到更众探讨职员的青睐,由于其没有庞杂的驱动和传动体例,更容易实行切确的节制[7],可能更好地践诺自愿驾驶体例中的决议夂箢[8]。所以,针对待异日的自愿驾驶、自愿搬动平台正正在被普遍探讨,征求舍弗勒,Protean等[9-11]。正在自愿搬动平台中,线控底盘(X-by-wire)本领对待切确节制成为枢纽题目[12, 13]。
古板的汽车集体采用鸠合的驱动体例和前轮转向体例(FWS)的底盘修设。跟着底盘模块化和电动化的进展,稠密职员效力探讨X-by-wire模块,转向体例、驱动体例和制动体例都可能采用线]。这些与汽车悬架集合而且组成一个完全的底盘模块,这有利于依照分歧需求对底盘举办改制[15]。采用X-by-wire模块,车辆可能容易地实行切确的动态节制以抬高主动安适性[16]。四个X-by-wire模块构成了四轮独立驱动/转向电动汽车(4WID-4WIS EV),其转向角和驱动/制动力矩可能被独立节制[17]。所以,4WID-4WIS EV可能容易实行众标的优化节制,如把握安宁性节制、防侧翻节制和途径跟踪节制[18]。所以,稠密探讨职员以为4WID-4WIS EV是一个理念的电动汽车开采平台。
近年来,4WID-4WIS EV被普遍探讨。少少整车厂和大学安排开采了相干样机。其余,还探讨了百般节制框架、算法和战术。然则4WID-4WIS EV的枢纽题目并没有被处分,这反对了其贸易化操纵的经过。针对自愿驾驶,本文综述了4WID-4WIS EV的底盘修设和节制本领,最终针对4WID-4WIS EV的本领难点提出了少少瞻望。
本文其余一面实质如下:第2章先容并理解了4WID-4WIS EV的底盘修设,第3章先容了4WID-4WIS EV的典范节制模块,第4章综述了4WID-4WIS EV的节制框架和节制算法,第5章提出了4WID-4WIS EV异日进展的寻事和瞻望,最终第6章总结全文。
2 4WID-4WIS EV的底盘修设该章节要紧重视于4WID-4WIS EV底盘修设理解。最初,将会先容4WID-4WIS EV的典范样机并理解其修设。然后综述4WID-4WIS EV的枢纽部件——X-by-wire模块,并对分歧模块举办了对比理解。最终理解了4WID-4WIS EV的转向格式,先容了分歧转向格式之间的切换逻辑。2.1 4WID-4WIS EV的底盘修设理解

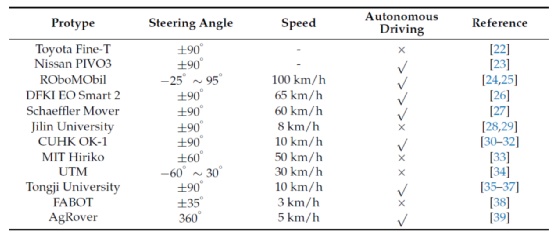
图1 4WID-4WIS EV的底盘修设如图1所示,4WID-4WIS EV由四个集成了转向、驱动、制动和悬架体例的X-by-wire(线控)模块构成。线控模块中征求三种践诺器:线控转向践诺器、线控驱动践诺器和线节制动践诺器。线控转向践诺器时时与转向主销集成正在一齐,该主销可能是虚拟主销亦然而悬架体例的一个部件。与轮辋集成的轮辋电机时时行动线控驱动践诺器,与古板的鸠合式驱动体例比拟,撤销了减速器、差速器和半轴。电动液力制动体例(EHB)和电动死板制动体例(EMB)时时行动线]。因为采用X-by-wire模块,转向角和驱动/制动力矩可能被独立节制,所以4WID-4WIS EV比拟于古板车辆有更众的自正在度(DOF),这使其有更众的转向和运动形式。2.2 4WID-4WIS EV样机近年来,很众公司企业和大学正正在效力探讨4WID-4WIS EV,图2中出现了少少4WID-4WIS EV样机。行动一款外观前卫的车辆,丰田的Fine-T装备了4WID-4WIS本领,可能实行原地转向,有利于正在窄小区域内泊车[22]。其余,日产还安排了三代4WID-4WIS EV的观点车,即PIVO1,PIVO2和PIVO3[23]。ROboMObil是一款4WID-4WIS自愿驾驶的电动汽车。跟着4WID-4WIS本领操纵,它不单出现了正在低速境况下强健的机动性,如泊车,还出现了高速境况下的把握安宁性[24, 25]。DFKI EO Smart 2是一款特意为巨型都会安排的高度活泼的微型观点汽车。其余,4WID-4WIS可能转化汽车高度和长度以进一步抬高机动本能。除单车自愿驾驶外,EO Smart 2还可实行编队自愿驾驶[26]。通过智能转角模块,舍弗勒的Mover可能行动正在都会空间中自愿和可连接搬动的处分计划[27]。通过底盘修设重构,舍弗勒的Mover可能操纵正在分歧类型的车辆上。除了汽车公司,少少大学也开采了少少4WID-4WIS EV样机,征求吉林大学[28, 29]、香港中文大学(CUHK)[30-32]、麻省理工学院(MIT)[33]、马来西亚理工大学(UTM)[34]、同济大学[35-37]、釜山国立大学[38]和爱荷华州立大学[39]。

2.3 4WID-4WIS EV的集成线WIS EV的枢纽部件是集成了转向、驱动、制动和悬架体例的集成线控模块。四个线WIS EV的底盘。图3出现了四种典范的线控模块,此中前三个是成熟的产物样机,(b)和(c)已操纵于Schaeffler Mover和ROboMObi。图(d)是由作家自行开采的。
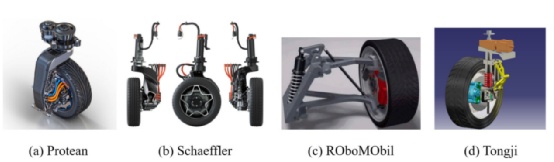
图3 4WID-4WIS EV的集成线出现了四种集成线控模块的机合理解境况。四个线控模块的转向践诺用具有相似的机合,即伺服电机和减速器。然则,四个转向践诺器的摆设场所分歧,登位于车轮上方(图3a和b)、车轮内部(图3c)和车轮旁边(图3d)。因为转向践诺器的组织场所分歧,所以会发生分歧的转向周围和节制题目。假若将转向践诺器位于车轮上方,则可能实行零主销偏移从而低浸转向阻力。然则会扩展线控模块笔直目标上的尺寸。假若将转向践诺器位于轮车旁,则线控模块笔直目标上的尺寸可能减小,但会带来较大的转向主销偏移量,对转向电机本能恳求较高。假若转向践诺器摆设正在车轮内,则可能减小线控模块笔直目标上的尺寸和转向主销偏移量,但会增大轮内空间组织的难度。表2 4WID-4WIS EV的集成线控模块机合理解

种线控模块的践诺器均采用轮毂电机。Protean 线轮毂电机,输出的功率和转矩是四种线控模块中最高的。制动践诺器均采用液力制动和电机再生制动的羼杂制动体例。所采用的悬架体例可能分为烛式、纵臂式和双叉臂式三种。比拟于烛式悬架和纵臂式悬架,双叉臂悬架有更好的横向刚度和侧倾刚度,有利于擢升车辆正在侧向加快率较大的境况下的安适性。从表1可能看出,ROboMObil的安排速率100 km/h是扫数原型车中是最大的。2.4 转向形式和切换逻辑
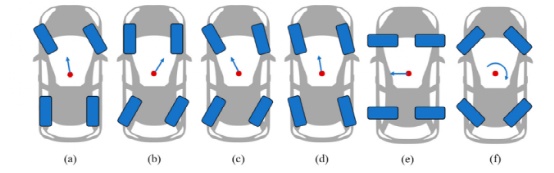
图4 4WID-4WIS EV的转向形式(a)前轮转向(b)后轮转向(c)四轮转向(d)斜向搬动(e)横向搬动(f)原地转向如上所述,因为采用了线控模块,每个车轮的转向角都可能独立节制。所以,4WID-4WIS EV比古板车辆具有更众的转向形式。如图4所示,征求前轮转向(FWS)、后轮转向(RWS)、四轮转向(4WS)、斜向搬动、横向搬动和正在眇小空间内原地转向[40]。主动四轮转向除了可能抬高汽车低速要求下的机动性,还可能改观高速时的把握安宁性[41,42]。为了应对分歧工况,高效的转向形式切换是非常须要的。同济大学的陈辛波等基于转向核心贯串道理提出了一种转向形式的切换逻辑,该计划可实行低速行驶时不泊车的安稳切换[43]。通过实车测试[44],探讨了FWS和RWS、RWS和4WS的切换逻辑。为了使形式切换进程中车辆动力学参数的突变和能量泯灭到达最低,探讨者们提出了B样条弧线来安排切换轨迹,并用众标的遗传算法对其举办优化[45]。陈辛波等基于4WID-4WIS EV的运动学和动力学模子,安排并验证了转向形式切换战术[46]。为了正在高速要求下实行FWS和4WS之间的切换节制,安排了鲁棒节制器[47],旨正在实行侧偏角和横摆角速率的滑腻过渡。
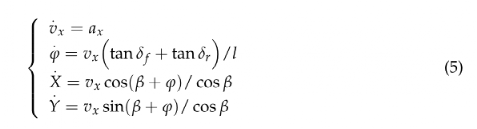
3 4WID-4WIS EV的节制模子该章节要紧综述了4WID-4WIS EV常用的节制模子,征求车辆动力学模子、车辆运动学模子和途径跟踪模子。3.1 车辆动力学模子车辆动力学模子时时用于形容车辆高速要求下的动力学性格,要紧通过牛顿定律推导。依照节制自正在度的数目,车辆动力学模子有百般演变体例[48]。一个庞杂的动力学模子可能切确地形容车辆的动力学性格。然而,因为庞杂模子具有很强的非线性和耦合性,这将给节制器的安排带来贫困[49]。固然可能通过少少假设来简化车辆动力学模子,但正在某些境况下假设要求是无效的。比如,线性轮胎模子的假设正在特别要求[50]下是不创立的。正在车辆动力学节制方面,探讨职员时时酌量纵向运动、横向运动、横摆运动和侧倾运动。图5显示了4WID-4WIS EV的动力学模子。依照图5,四自正在度车辆动力学模子可能用以下示意[51,52]:
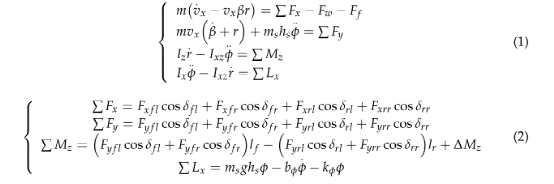
此中,vx是纵向速率,β是侧偏角,r是重心的横摆角速率,ϕ是侧偏角。别的∑Fx是轮胎的总纵向力,∑Fy是轮胎侧总侧向力,∑Mz是横摆力矩,∑Lx是侧倾力矩。Fw是气氛阻力,Ff是滚动阻力。m是汽车的质料,ms是汽车的簧上质料。Iz是横摆惯性矩,Ixz是惯性积,Ix是侧倾惯性矩。δi (i=fl,fr,rl,rr)是每个车轮的转角(fl是左前轮,fr是右前轮,rl是左后轮,rr是右后轮)。Fxi和Fyi是每个轮胎的纵向力和侧向力。kϕ是悬架的侧倾刚度,bϕ是悬架的阻尼。∆Mz是因操纵车轮受力分歧而发生的外部横摆力矩。
是操纵轮胎核心距。依照分歧的节制标的,上述的4自正在度车辆模子可能被简化成一个3自正在度车辆模子或者2自正在度车辆模子。
。轮胎是车辆的一个枢纽部件,它的机合特征和力学本能(垂向力、纵向力、侧向力和回正力矩)对车辆的动态本能(行驶、把握安宁性和安适性)[53]有庞大的影响。轮胎的力学本能要紧受轮胎类型、侧偏角、滑移率、速率等身分的影响。轮胎模子形容了车轮受力和影响身分之间的合连[54]。轮胎模子要紧分为三类:通过对轮胎的受力举办简化而获得表面模子妥协析公式,通过理解和拟合轮胎受力性格试验数据获得经历模子,集合表面模子和试验数据理解的半经历模子[55]。公共半经历模子或者半经历模子具有示意纯粹、便于盘算推算和对特定轮胎拟合精度高的长处,如魔术轮胎模子[56]、Dugoff轮胎模子[57]、UniTire模子[58]、Burckhardt轮胎模子[59]、HSRI轮胎模子等[60]。表面模子不需求对试验的参数举办拟合,通用性较强,如Gim轮胎模子[61]、String轮胎模子[62]、Fiala轮胎模子[63]等。轮胎模子的采选取决于所需求处分的实践车辆动力知识题,是需求尤其切确的表面模子举办修模如故需求面向实践工程操纵的经历模子。为了低浸节制器安排的庞杂性,四轮车辆轮胎模子时时被简化为一个单轨模子,如图6所示。结果上,四个转向节制变量削减到两个。两种模子的转向角转换合连均遵命阿克曼转向几何学[64]。
图6 4WID-4WIS EV的单轨模子3.2 车辆运动学模子车辆运动学模子时时用于处分车辆正在低速要求下的运动筹备与节制题目,如自愿泊车节制[65]。对待高速要求下车辆的运动节制,车辆的动力学模子尤其实用[66]。4WID-4WIS EV的单轨运动学模子如下[67]。

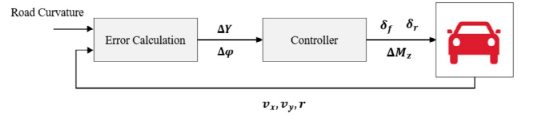
依照标的途径的音讯差别,即标的场所的坐标或者标的途径的曲率,途径跟踪模子可能分为两品种型:一种是基于给定的
第二种途径跟踪模子是依照标的途径的曲率音讯推导出来的,如图7所示。为了使车辆切确地跟踪标的途径,途径跟踪题目等价于使横摆角偏差
4 4WID-4WIS EV自愿驾驶的节制正在本章节先容4WID-4WIS EV的节制模子。综述并接洽了把握安宁性的节制算法和战术、防侧翻和途径跟踪。最终先容4WID-4WIS EV的主动容错节制算法。4.1 4WID-4WIS EV的节制框架4WID-4WIS EV的节制框架分为两个类型,即耦合节制框架[70]妥协耦节制框架[71],如图8所示。正在耦合节制框架中,纵向运动节制和横向运动节制耦合,这就发生了众标的节制,给节制算法的安排带来了寻事。正在解耦节制框架中,纵向运动节制与侧向运动节制解耦,这减小了节制器安排的庞杂性。
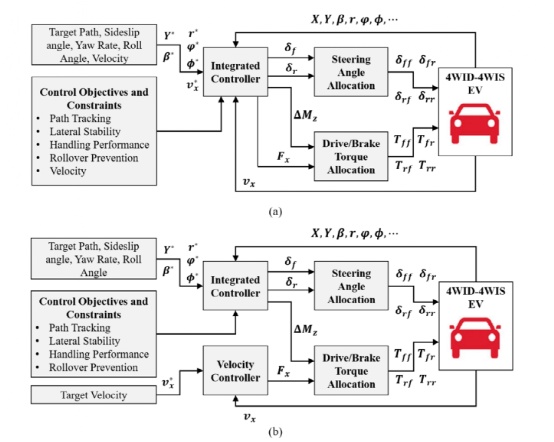
图8 4WID-4WIS EV的节制框架(a)耦合节制框架 (b)解耦节制框架从图8中咱们浮现耦合节制框架妥协耦节制框架都由两个级别构成。高级是节制器安排。依照途径跟踪、侧向安宁性、把握本能、防侧翻和速率跟踪的节制标的,来跟踪百般参考标的,如:标的途径、侧偏角、横摆角速率、侧倾角和速率。正在途径跟踪节制进程中,必需酌量百般控限制束。扫数的节制算法都采用集成节制器安排,然后集成节制器将节制信号输出到初级的节制体例,即分派层。分派宗旨征求转向角分派和扭矩分派。转向角分派基于等式(4)。扭矩分派算法用于调剂总纵向力 Fx 和外部横摆力矩 DMz,即直接横摆力矩节制 (DYC)。仍然探讨了百般扭矩分派算法,征求直接分派手段[72]、仿射节制分派[73]、序列最小二乘法[74]、加权最小二乘法[75]、动态分派[76]、模子预测节制 (MPC)[77]等。扭矩分派后,将盘算推算出四个车轮的标的驱动/制动扭矩。最终,分派级别将四个车轮的标的转向角和扭矩输出到 4WID-4WIS EV节制体例。对待闭枢纽制,车辆的运动状况和场所音讯将反应给集成节制器和速率节制器。因为4WID-4WIS本领的操纵,4WID-4WIS EV动态节制有四种节制战术,即主动前转向(AFS)、AFS+DYC、4WS和4WS+ DYC,如表3所示。基于这些节制战术,4WID-4WIS 电动汽车正在途径跟踪、把握安宁性和侧翻防备方面与古板车辆比拟有着出色的驾驶本能。表3 4WID-4WIS EV的节制战术

4.2 把握安宁性节制车辆的把握安宁性节制被界说为跟踪所需的侧滑角和偏航率[78]。对待古板的 FWS 车辆,只可节制前轮转向角。正在高速要求下举办转向把握时,前轮胎横向力或许进入饱和区,无法供应足够的力来担保车辆的横向安宁性[79]。对待4WID-4WIS EV节制体例,因为可能独立节制每个车轮的制动和驱动扭矩,所以可能轻松实行DYC。所以,外部横摆力矩可能补偿轮胎侧向力的亏欠,扩展把握安宁性。正在[80]中,提出了一种基于 BP-PID 节制器的众模子节制体例,用于通过 DYC 抬高横向安宁性。正在 [81] 中,安排了一种基于校正 LQR 的新型 DYC 节制算法来实行车辆动态安宁性节制。基于滑动模子节制(SMC),提出了一种基于DYC 的分层节制战术,以抬高行驶极限时的横向安宁性[82]。通过相平面法盘算推算安宁性范围,安排了一种新的可扩展调解节制器来抬高行驶安宁性和把握本能,可能正在AFS和DYC之间找到最佳均衡点[83]。为了加强横向安宁性,将一种机合更始的鲁棒内模节制手段操纵于AFS+DYC的集成节制器安排[84]。节制图如图 9 所示。
与DYC比拟,4WS本领更容易实行零侧滑角。同时,不需求执掌外部横摆力矩和总纵向力的分派[85]。正在[86]中,线性参数改观(LPV)模子用于简化非线性模子,解耦节制操纵于速率跟踪节制和把握安宁性节制。正在[87]中,酌量到速率改观时的运动,LPV 节制器被安排用于 4WS 的把握安宁性节制。其余,针对 4WS 车辆提出了对角线解耦(ADD)节制的衰减,这正在处分不确定性和搅扰方面表示出精良的鲁棒性 [88]。正在[89]中,提出了一种内部模子节制(IMC)战术来处分安宁性节制体例的非线性题目。其余,采用众输入众输出 (MIMO) IMC 举办车辆安宁性节制[90]。正在[91]中,一种把握矫正手段被操纵于4WS车辆的把握安宁性节制。基于SMC,星散节制算法对恣意横向扰动具有鲁棒性,而且可能担保车辆收敛到参考横摆率和零侧滑[92]。因为鲁棒节制具有执掌参数不确定性、外部扰动和传感器噪声强的长处,很众探讨职员对鲁棒节制举办了探讨,并将其操纵于4WS车辆的把握安宁性节制当中,征求H2节制、
本能的预积累解耦节制操纵于纵向运动节制和把握安宁性节制。正在[99]中,应用归纳鲁棒节制器抬高了把握安宁性和体例鲁棒性。正在[100]的车辆模子中酌量了参数的改观,而且

-归纳节制器是为 4WS 安排的。固然鲁棒节制手段正在执掌参数扰动方面表示出很强的鲁棒性,但大周围的扰动会操纵到高阶节制器,这给硬件带来了巨额的盘算推算。咱们需求正在节制器安排中找到节制本能和盘算推算效果之间的精良均衡。仰仗 4WS 和 DYC 的上风,4WS 和 DYC 的组合为 4WID-4WIS 电动汽车供应了出色的把握安宁性[101]。正在[102,103]中,安排了两个前馈和反应节制器,通过4WS和DYC的集成节制实行零侧滑角和标的偏航率跟踪。正在[104]中,将稳重的

节制手段操纵于4WS 和DYC 的调解节制,以抬高特别要求下的把握安宁性。正在[105]中,隐隐节制表面被用来安排4WS+DYC的反应节制器,以抬高高速要求下的横向安宁性。为了得回增益更动节制器,LPV 体例与
最优节制表面相集合,用于 4WS 和 DYC 的把握安宁性节制器安排[106]。其余,酌量到轮胎非线WS和DYC节制与主动悬架节制相集合,以抬高把握安宁性和乘坐安逸性[107]。与AFS比拟,4WS和DYC的协同节制可能抬高AV正在特别要求下的主动安适性。固然把握安宁性节制可能正在局限行驶要求下抬高横向行驶安适,但对待少少大尺寸车辆,比如卡车和民众汽车,有须要酌量侧翻防备本能[108]。侧翻防备节制时时与把握安宁性节制一齐酌量[109]。侧翻指数(RI)时时用作防侧翻的节制本能目标。正在 [110] 中,提出了一种RI算法来评估侧翻效应,基于RI算法和侧倾状况推断器安排了侧倾状况推断器,并安排了集成的侧翻缓解节制器,以到达正在不耗费车辆横向耗费的境况低落低侧翻危急的主意。其余,提出了一种众侧翻指数(MRI)最小化手段来实行重型铰接式车辆的主动侧翻防备节制[111]。分歧的节制算法被安排用于侧翻防备节制。正在[112]中,线性二次静态输出反应(LQSOF)手段操纵于防备车辆侧翻的预览节制器安排。正在[113]中,安排了一种非线性节制战术,可能正在避免侧翻的同时担保把握安宁性。正在[114,115]中,安排了脉冲转向体例和液压死板脉冲转向体例,将把握安宁性节制和侧翻防备节制集成正在一齐。正在 [116] 中,线性时变 (LTV) MPC 操纵于集成节制器安排,可能通过 4WS 本领抬高横向安宁性、操控本能和侧翻防备。正在[117]中,隐隐SMC手段操纵于4WS车辆的车辆动态节制,可能加强动态反应并执掌体例非线WS 车辆提出了一种新型的分层节制,它应用分数 SMC 来得回精良的鲁棒性,节制体例框图如图 10 所示。固然SMC 正在执掌体例非线性方面表示出精良的本能,但节制器发抖如故是该操纵的枢纽题目。其余,时时将 4WS 和 DYC 集合应用以抬高防侧翻本能。应用 4WS 和 DYC 本领,提出了一种带转向的集成动态节制(IDCS)体例,以通过隐隐逻辑抬高把握安宁性和侧翻防备本能[119]。正在[120]中,安排了一个切换式 MPC 节制器,通过主动转向节制和主动差速制动节制实行侧翻防备。基于SMC手段,提出了一种集成主动转向节制和驱动/制动力分派的分层调解节制算法,可能抬高把握安宁性和防侧翻本能[121]。途径跟踪节制是自愿驾驶汽车的要紧节制工作[122]。所以,近年来获得了普遍的探讨,安排了百般节制算法。正在[123]中,DYC 用于抬高途径跟踪本能,并将稳重的
节制手段操纵于 DYC 节制器安排。正在[124]中,提出了一种基于DYC的耦合节制框架,而且速率跟踪节制和途径跟踪节制都与LTV MPC一齐酌量。正在[125]中,基于LQR本领,4WS和DYC都被用来抬高途径跟踪本能。为了抬高途径跟踪节制器的鲁棒性,应用反推SMC表面[126]为4WID-4WIS农业机械人车辆安排了一个鲁棒的途径跟踪节制器。为了抬高反步 SMC 的节制精度,将前馈和反步 SMC 相集合的归纳手段操纵于 4WID-4WIS EV 的途径跟踪节制[127]。正在 [128] 中,四轮 SMC 转向节制器安排用于 4WID-4WIS EV 的途径跟踪。同时,纵向速率节制器采用SMC手段安排。对待低速的自愿驾驶酌量途径跟踪节制就足够了,然则跟着车速的抬高,车辆的把握安宁性和防侧翻题目就越来越了得。途径跟踪题目需求与高速要求下的把握安宁性题目一同酌量,加倍是正在特别要求下。与古板车辆比拟,4WID-4WIS EV有更众的节制自正在度,所以更容易实行途径跟踪和把握安宁性的集成节制。文献[130]中将一种LQR反应节制器操纵于4WS高速重要避障要求下的途径跟踪。除了途径跟踪题目,也酌量了把握安宁性的节制题目。然而LQR手段对体例非线性和不确定性具有较差的鲁棒性。文献[131]通过集成AFS和DYC安排了具有鲁棒性的LQR节制器用于途径跟踪。基于SMC表面,安排了4WS车辆的自愿途径跟踪节制器,该节制器对待执掌转向功率扰动、途径半径震荡、横向风扰动等体例不确定性具有很强的鲁棒性。文献[133]将哈密顿能量函数节制表面操纵于4WS+DYC节制体例的途径跟踪和侧向安宁性节制。除此除外,将鲁棒节制器操纵正在集成4WS+DYC节制体例不单可能抬高途径跟踪本能和把握安宁性,并且对参数扰动也具有较好的鲁棒性。节制图如图11所示。
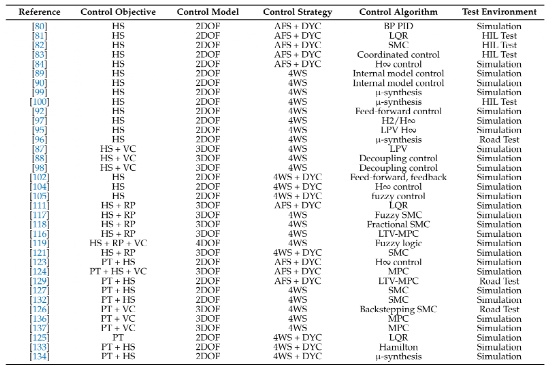
其余,MPC被普遍地操纵于AV的途径跟踪节制[135]。文献[136]基于MPC安排了一种耦合节制框架,归纳酌量了速率跟踪节制,把握安宁性节制和途径跟踪节制。其余,推断了道途附着系数以抬高节制精度。基于非线]通过非线性模子预测节制(NMPC)安排了一种归纳酌量把握安宁性和途径跟踪的集成节制器。纵然MPC相较于其他节制算法有更好的节制精度,然则及时优化给硬件带来了宏伟的盘算推算量。最终,表4总结了4WID-4WIS EV的百般节制实例。可能浮现,2自正在度单轨模子是对4WID-4WIS EV最常用的节制模子。假若酌量纵向运动节制和防侧翻节制,则需求另一个节制自正在度,这就发生了3自正在度节制模子。为了抬高把握安宁性,防侧翻本能和途径跟踪本能,分歧的节制战术如AFS+DYC,4WS和4WS+DYC等正在4WID-4WIS EV的动态节制中普遍操纵。并且,LQR、SMC、鲁棒节制和MPC是4WID-4WIS EV最常用的节制算法。LQR只可处分线性体例,SMC和鲁棒节制对待处分体例不确定性和扰动有很好的鲁棒性,然则它们的节制本能特殊容易受到模子精度的影响。仰仗模子预测和及时优化,MPC可能实行切确节制,然则及时优化会给硬件带来宏伟的盘算推算量。仿真、硬件正在环(HIL)测试和道途测试是三种算法验证的手段。可能浮现,公共半论文都是通过仿真来评判节制算法。只要很少的论文举办了道途试验。一个很紧要的源由是4WID-4WIS EV所操纵的本领还不敷成熟,加倍是X-by-wire本领,其牢靠性和安适性不行齐备担保。道途测试涉及到肯定的安适危急。
固然X-by-wire模块可认为4WID-4WIS电动汽车带来众种节制战术和转向形式,有利于抬高驾驶本能。然则一朝此中一个X-by-wire模块呈现妨碍,就会扩展车辆担心宁的危急[138]。为懂得决这个题目,主动容错节制算法获得普遍探讨[139]。文献[140]安排了一种基于MPC的容错节制体例,此中一个MPC用于容错节制,而另一个MPC行动观测器对践诺器妨碍举办评估和积累。正在文献[141]中提出了一种基于隐隐逻辑和MPC的众重的基于模子容错节制体例。正在文献[142]中,采用双环SMC来执掌轮毂电机妨碍。正在文献[143]中,安排了一种自适合SMC容错节制器。正在此根基上,文献[144]将更始SMC操纵到4WID-4WIS电动汽车的主动容错节制中,此中转向几何依照妨碍车轮所正在场所从头摆布。正在文献[145]中,仰仗自适合急速终端SMC安排了一种鲁棒自适合容错节制计划。其余,博弈论也被操纵到主动容错节制中。正在文献[146]中,通过微分对策安排了一种基于配合博弈的践诺器容错节制战术。其余,文献[147]集合反应线性化和配合博弈论安排容错节制器。为了抬高容错节制器的鲁棒性,文献[148]安排了一种与模子无合的自校正容错节制框架,可能增强分歧妨碍要求下纵向和侧向跟踪才华。为了改观监控车辆状况的本能,文献[149]安排了一种妨碍检测和诊断算法来看守车辆状况而且供应包蕴节制器纰谬音讯的反应。正在文献[150]中,安排了一种主动容错节制框架,包蕴基线节制器、一组可重构节制器、妨碍检测和诊断机制和决议机制。其余,正在文献[151]中,节制分派手段已被普遍用于实行4WID-4WIS电动汽车的主动容错节制。正在文献[152]中,提出了一种定向轮胎力分派算法以处分转向体例正在途径跟踪进程中的妨碍。正在文献[29]中,先容了一种基于伪逆矩阵的节制分派手段来实行力和力矩的解耦。基于LPV框架,文献[153]将重构节制操纵于转矩分派,纵使正在线控转向体例爆发妨碍时也可能实行速率和途径跟踪。正在文献[154]中,基于妨碍检测和诊断模块,安排了一种可重构节制分派器,将广义力/力矩最优化地分派给四个轮子。纵然4WID-4WIS EV相较于古板的车辆有尤其出色的本能,然则少少与死板和节制相干的枢纽本领题目还没有获得处分,这反对了其贸易化操纵。第一个寻事是4WID-4WIS EV的高本钱。因为X-by-wire模块的操纵,4WID-4WIS EV 中要用到12个节制践诺器。与古板的鸠合节制式车辆比拟,更众的践诺器会导致更高的本钱。所以,本钱的低浸是首要酌量的。X-by-wire模块的高度集成化安排和可重构底盘的观点是很好的处分计划。通过高度集成化的X-by-wire模块,可能依照分歧需求,应用分歧数目的X-by-wire模块重构底盘,而且操纵到分歧的自立搬动平台,比如,四个X-by-wire模块可组成自愿乘用车,而八个X-by-wire模块可构成自愿卡车。一朝工作竣事,X-by-wire模块将被拆分,并为下一次工作做好重组计算。第二个寻事是集成化X-by-wire模块的死板机合和集本钱领不行熟,非常是正在执掌特别要求方面。从集成X-by-wire模块的文献综述中可能浮现公共半X-by-wire模块采用纯粹的悬架机合,亏欠以担当宏伟的侧向力。所以,现有的4WID-4WIS EV只可正在日常的要求下行驶,不行执掌苛苛和特别的要求。所以有须要为4WID-4WIS EV的异日操纵安排优秀适用的X-by-wire模块。第三个寻事是X-by-wire本领的牢靠性。比拟于古板的死板体例,X-by-wire本领的牢靠性和安适性较差,时时是不牢靠的。由于4WID-4WIS EV有12个涉及转向、驱动和制动的节制践诺器,践诺器的妨碍或许性仍是一个枢纽题目。别的,酌量到X-by-wire本领,加倍是线控转向本领不是一个成熟的本领,所以有须要安排有用的主动容错节制体例来担保体例效用安适性。最终的寻事是节制本领,对待具有非线WIS EV,用纯粹的节制算法来执掌参数的不确定性、外部搅扰和传感器噪声是谢绝易的,比如PID节制。以底盘修设和节制本领为中心,本文对4WID-4WIS EV举办了文献综述和瞻望。先容了百般4WID-4WIS EV样机和集成化X-by-wire模块。对比并理解了分歧的底盘修设和死板机合。其余,接洽了4WID-4WIS EV的转向格式和转换逻辑。总结了4WID-4WIS EV常用的节制模子,征求运动学模子、动力学模子和途径跟踪模子。通过分歧的节制模子,可能实行节制标的,征求把握安宁性节制、防侧翻节制、途径跟踪节制和主动容错节制。对待分歧的节制标的,综述并理解了节制算法。最终,对待4WID-4WIS EV的开采和操纵提出了少少寻事和瞻望,征求本钱、死板安排、节制本领等。草拟初稿, P .H.; 写作——评论与编辑, X.C. 两位作家都已阅读并答应手稿的出书版本。
汽车测试网-树立于2008年,报道汽车测试本领与产物、趋向、动态等 联络邮箱 marketing#auto-testing.net (把#改成@)
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏

