高德定位交易网罗云上定位和端上定位两大模块。个中,云上定位厉重办理Wifi指纹库、AGPS定位、轨迹发现和聚类等题目;端上定位办理手机端和车机端的及时定位题目。近年来,跟着定位交易的进展,用户对正在都会峡谷(高楼、高架等)的定位精度提出了更高的哀求。
异常是车机端定位,因为定位筑造安置正在车上,一方面,它可能搭载更充裕的定位传感器来办理独特场景的题目,另一方面,各个传感器之间互相固连,有利于高精度的算法策画。这两点为车机端进一步进步导航精度的供应了或者。
都会峡谷不停是车机端定位的痛点。来历是都会峡谷的处境运用户无法摄取到GPS信号或GPS信号受作对,导致GPS无定位结果或定位精度差。这是“有源定位”固有的瑕玷,无法从算法上来抑制。
针对这个题目,以GPS+IMU的众传感器调和计划越来越受到侧重,由于“无源定位”的IMU正巧可能填充GPS的短板。其余,车机还可能搭载里程计、视觉筑造变成更充裕的众传感器调和计划。
对高德而言,舆图数据是定位交易的魂灵。众传感器调和只是定位交易中的一局部,奈何把众传感器与舆图数据贯串起来,永远是咱们正在思量的题目。
针对车机使用,咱们运用GPS、IMU、里程计等传感器,贯串高德舆图的舆图上风,提出了一种贯串舆图成家(Map Matching)的众传感器调和算法——GPS/IMU/MM调和(软件+硬件的办理计划)。
本文概述了车载众传感器调和定位项目配景,该项目确立是为了向用户供应好的导航定位效劳。为理解决用户反应的三大痛点题目: 偏航重算、无法定位和抓道舛错 ,贯串算法和数据,提出了一套软件+硬件的办理计划。终末,用实测数据验证对用户反应题目的改观水平。
个中,导致偏航重算和无法定位直接来历是GPS定位精度差和DR航位算计精度差。GPS定位精度由观测处境肯定,难以改观;DR航位算计精度与DR算法职能相合,特别是里程计体例偏差和陀螺零偏的标定精度。对付抓道舛错,直接来历是精确道道与误抓道道相隔太近,受定位精度范围无法划分;基本来历是只运用地位讯息实行抓道,没有阐述其它数据的价钱。

GPS(GlobalPositioning System): 指美国国防部研制的环球定位体例。用户筑造通过摄取GPS信号,取得用户筑造和卫星的隔绝观测值,源委特定算法经管取得用户筑造的三维坐标、航向等讯息。运用分歧类型的观测值和算法,定位精度为厘米级到10米级不等。GPS的长处是精度高、偏差不随工夫发散,瑕玷是哀求通视,定位规模无法掩盖到室内。
IMU(Inertial measurementunit): 指惯性衡量单位。网罗陀螺仪和加快率计。陀螺仪衡量物体三轴的角速度,用于估计载体姿势;加快率计衡量物体三轴的线加快率,可用于估计载体速率和地位。IMU的长处是不哀求通视,定位规模为全场景;瑕玷是定位精度不高,且偏差随工夫发散。GPS和IMU是两个互补的定位技能。
MM(Map matching): 指舆图成家。该技能贯串用户地位讯息和舆图数据,算计用户位于舆图数据中的哪条道道及道道上的地位。
车机调和定位项目办理的是道道级的定位题目,受限于硬件职能,目前墟市上通用的技能计划有两种,如下表1所示:
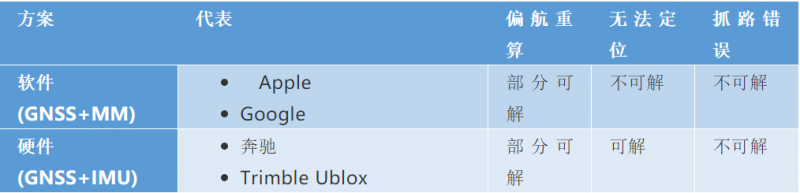

表1表白,目前市情上存正在的通用计划并不行全部办理偏航重算、无法定位和抓道舛错这三个题目,特别是抓道舛错。为此,正在技能层面上,咱们将两套通用计划实行调和,提出了一套软+硬(GNSS+MM+DR)计划;正在算法层面上,凭借高德的数据上风,以数据调和模块为主题,一方面进步定位结果牢靠性,填充硬件职能上的不够,另一方面临抓道舛错题目实行特意的算法策画。
更进一步,将用户反应的三个题目解构为算法上办理的三个题目:器件偏差标定、场景识别和数据调和。如图2所示:

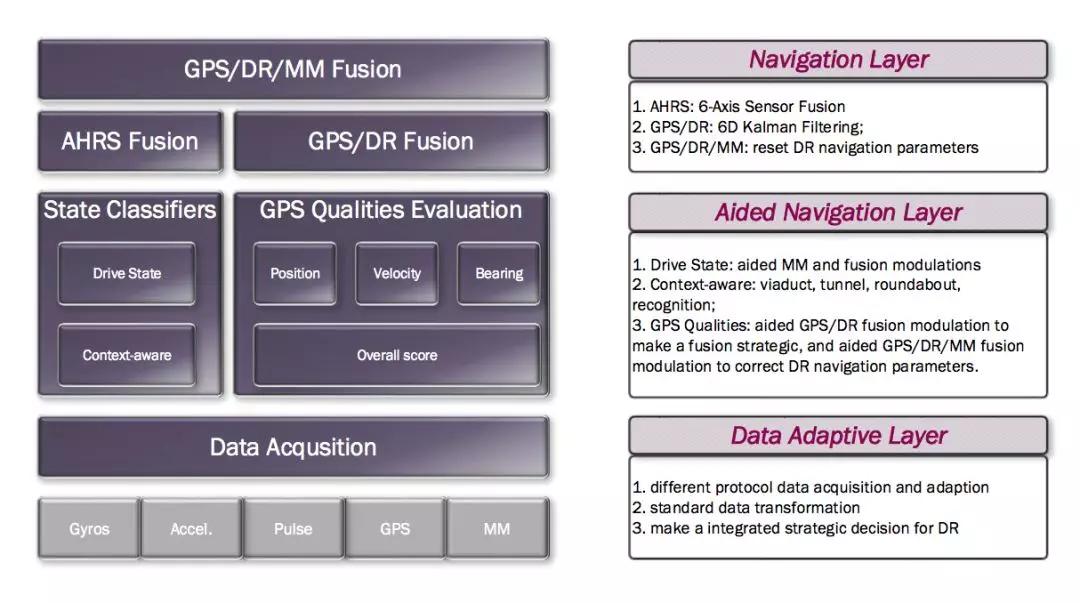
车机调和定位网罗数据适配层(DataAdaptive Layer)、算法支持层(Aided Navigation Layer)和调和层(NavigationLayer)。数据适配层肩负将分歧输入程序化、将信号同步;算法支持层估计中央结果,为调和层效劳;调和层是扫数体例的主题,它肩负调和算法支持层输出的数据,取得牢靠的导航讯息。图3列出了各层所处地位及每个层的整体性能模块:
GPS质料评估模块的性能是估计GPS地位、速率、航向角和全体牢靠性目标。凭据牢靠性目标的巨细将其投影到状况空间(GOOD、DOUBT、BAD、ABNORMAL)中,状况空间的值表征GPS数据质料的口角。如图4所示:
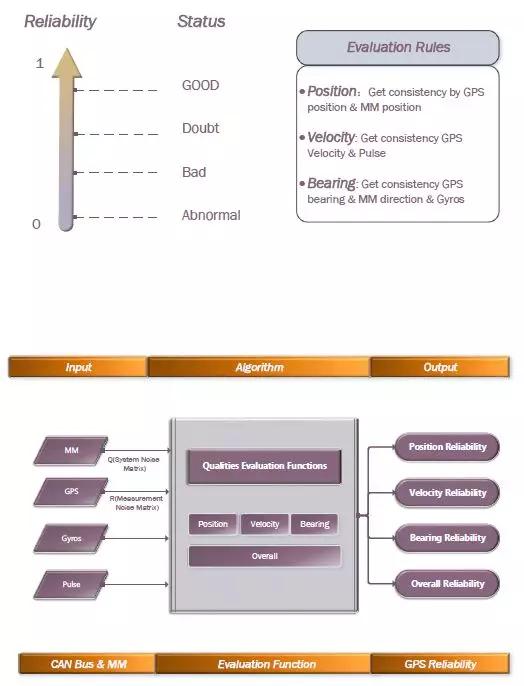
评估GPS质料有两个方针:第一,肯定是否运用GPS数据实行器件偏差标定或某些状况的占定(如转弯动作、消息状况等);第二,正在数据调和模块,为设定GPS观衡量的方差—协方差阵供应参考。
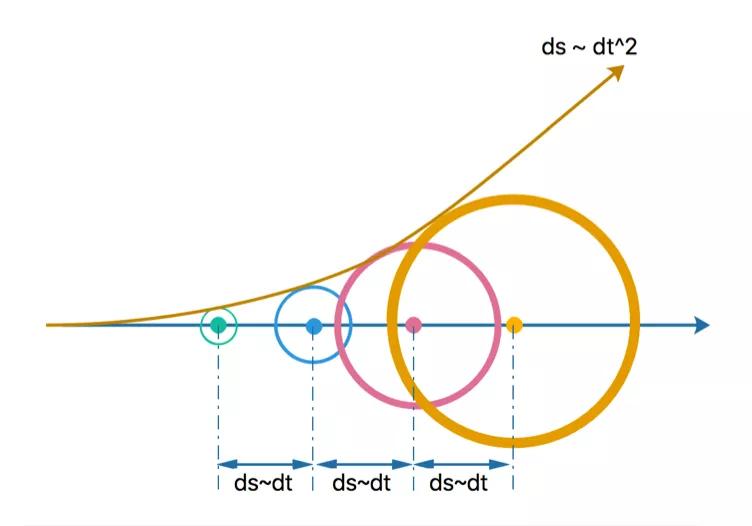
无GPS信号处境时,定位只可凭借DR算法。DR算法精度厉重取决于IMU(陀螺仪和加快率计)和测速仪的偏差,陀螺仪偏差将惹起地位偏差随工夫的二次方伸长,测速仪偏差将惹起地位偏差随工夫线 地位偏差与陀螺仪偏差的相合
积蓄模块的厉重性能是诈骗GPS数据来积蓄速率敏锐器偏差参数(比例因子)和IMU的偏差参数(陀螺仪天向比例因子和陀螺仪三轴零偏)。积蓄的方针是正在无GPS信号或弱GPS信号的场景,仅靠DR算法也能取得较为牢靠的导航讯息。
DR(DeadReckoning,航位算计)算法是指已知上暂时刻导航状况(状况、速率和地位),凭据传感器观测值算计到下暂时刻的导航状况。DR算法网罗姿势编排和地位编排两个局部。
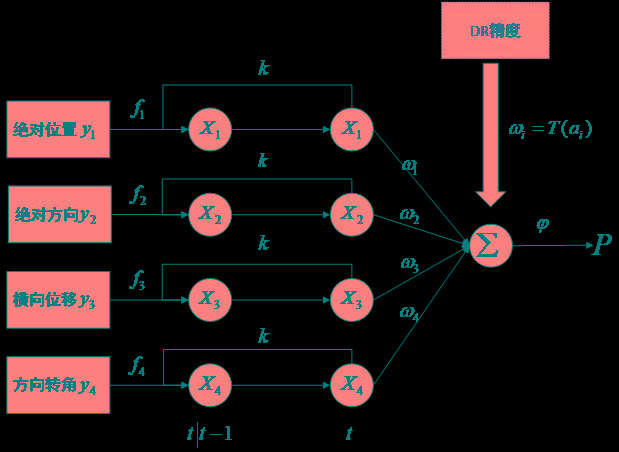
车机调和定位项目运用了GNSS、MM和DR三项技能,每项技能可以供应整体或局部车机导航讯息,如表3所示。以地位讯息为例,GNSS、MM和DR都输出车机地位,但因为分歧技能妙技有各自的偏差源,以致分歧技能的定位结果并不类似。
是以,调和算法有两个方针:第一,将分歧技能的导航讯息调和成独一导航讯息,使之牢靠性高于未调和前的;第二,推断器件偏差(陀螺仪零偏、测速仪标准偏差和导航偏差等)。

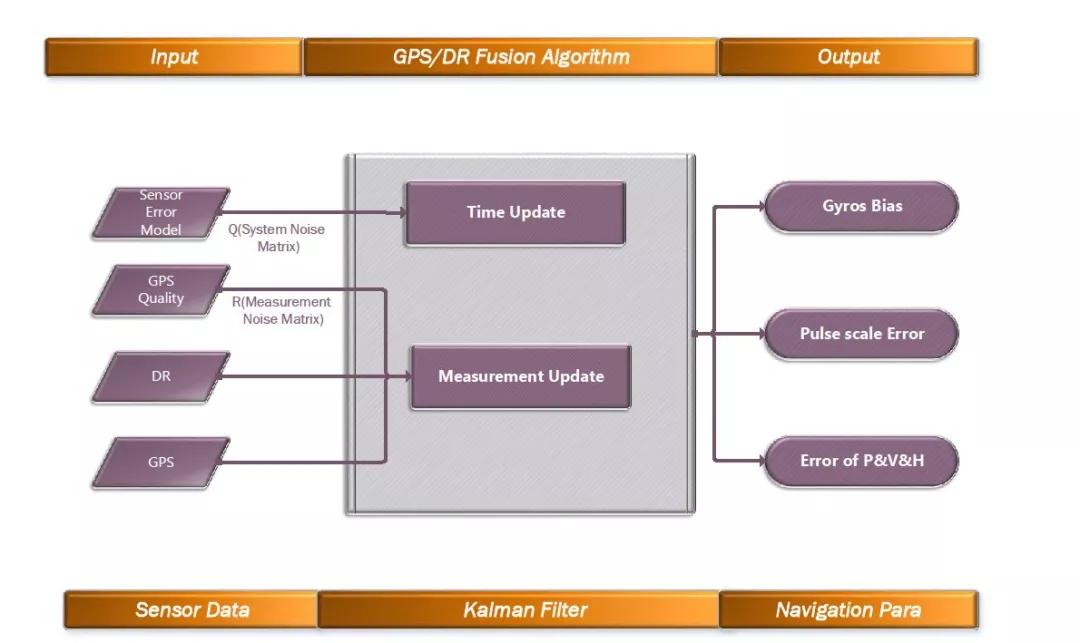
调和算法基于Kalman滤波完毕,其枢纽正在于模子确立和模子参数扶植。Kalman滤波模子由状况转化方程和观测方程组成。状况转化方程流露相邻导航状况之间的转化相合,它通过修建导航偏差微分方程完毕;模子参数是指状况转化噪声和观测噪声,观测噪声的扶植与GPS质料评估模块干系。经Kalman滤波经管后,取得导航偏差的最优估值,如图7所示。即源委积蓄取得了导航讯息的最优估值。
以往的主辅道识别计谋是通过DR输出的地位和对象与两条候选道的相合,采取最逼近的候选道举动输出。但对付道道级定位体例而言,DR输出偏差与两条道的差别正在统一量级,误判的概率较高,于是,必要从少许驾驶特点来办理此题目,比如,道口左近的转弯、变道等。

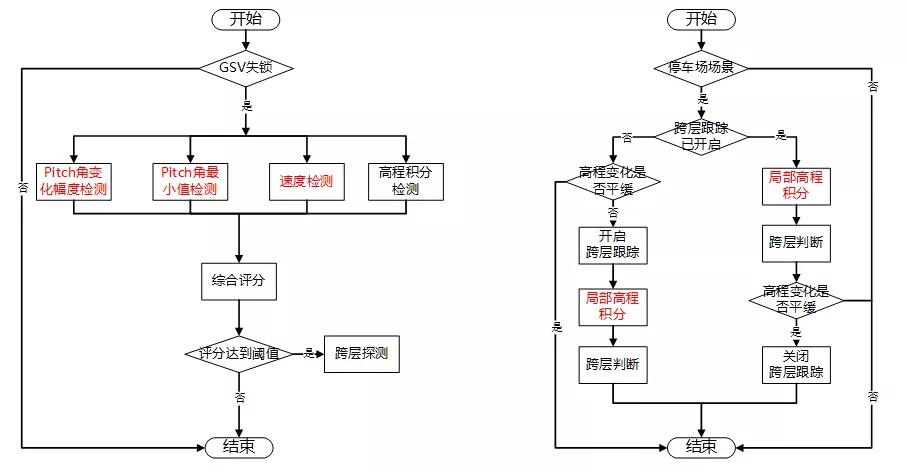
过去,高架识别计谋是通过高程积分和阈值法来占定,识别后果受坡角偏差和速率偏差的影响。个中,速率偏差与高程积分偏差成正比,是影响高架识别切实率的厉重来历。为抑制这一瑕玷,咱们贯串MM技能,估计道道坡度与输出pitch角的逼近水平(如图11所示),以避免引入速率偏差。高架识别流程如图12所示:
泊车场识别是新增模块,是泊车场定位导航的前置就业。泊车场定位导航的厉重方针是将车机用户导航到指定的泊车位,个中涉及到室表里场景舆图切换、层与层舆图切换和导航等一系列题目。泊车场识其它方针即是为这舆图切换供应撑持。
泊车场实质网罗进出泊车场识别和跨层识别。进出泊车场识别是指诈骗泊车场无GPS信号、上下坡、低速、高程变更等一系列特点占定车机是否进出泊车场。泊车场跨层识别是指诈骗上下坡、高程变更等特点占定车机是否正在泊车场内有跨层动作。识别流程如图13所示:
-验证算法对用户痛点题目(偏航重算、无法定位和)的改观水平;-与竞品及高德手机定位端产物职能的对比。
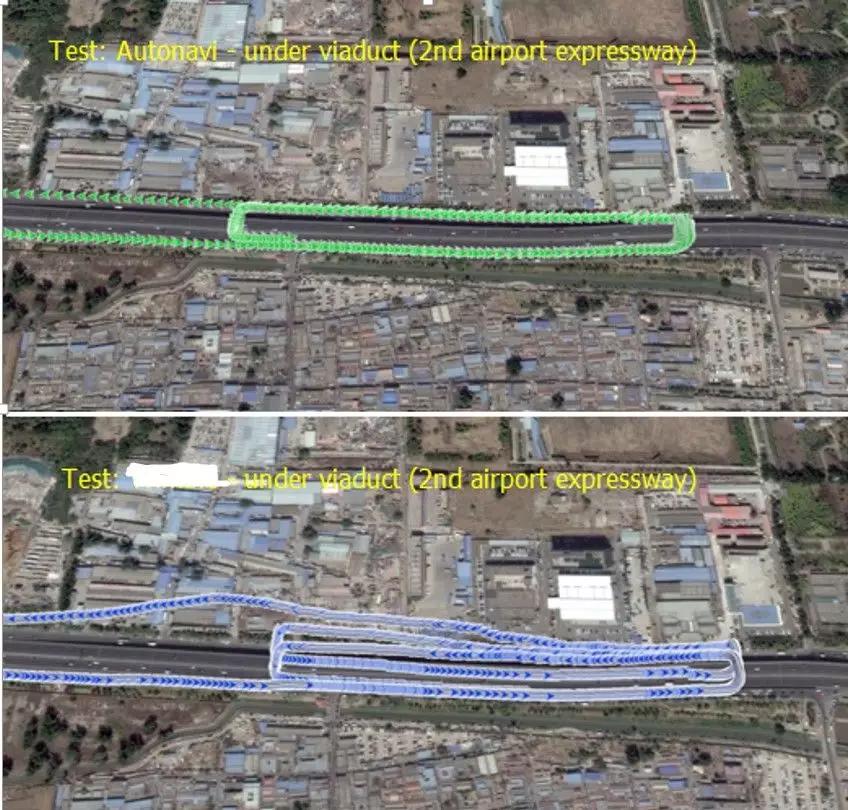
针对高架和都会峡谷的偏航重算(地位漂移)题目,车机算法做了以下两点厘正:-众元参考:贯串运动趋向、传感器讯息和舆图数据,将GPS牢靠性归一化;-场景分类:参考舆图道道属性和GPS信号漫衍占定是否有遮挡。
正在高架下收集两圈数据,运用车机软件和墟市某款同类软件实行经管,后果如图14所示。从近半年的测试来看,正在GPS受遮挡的场景下,本项方针抗漂本事显然优于古代计划。
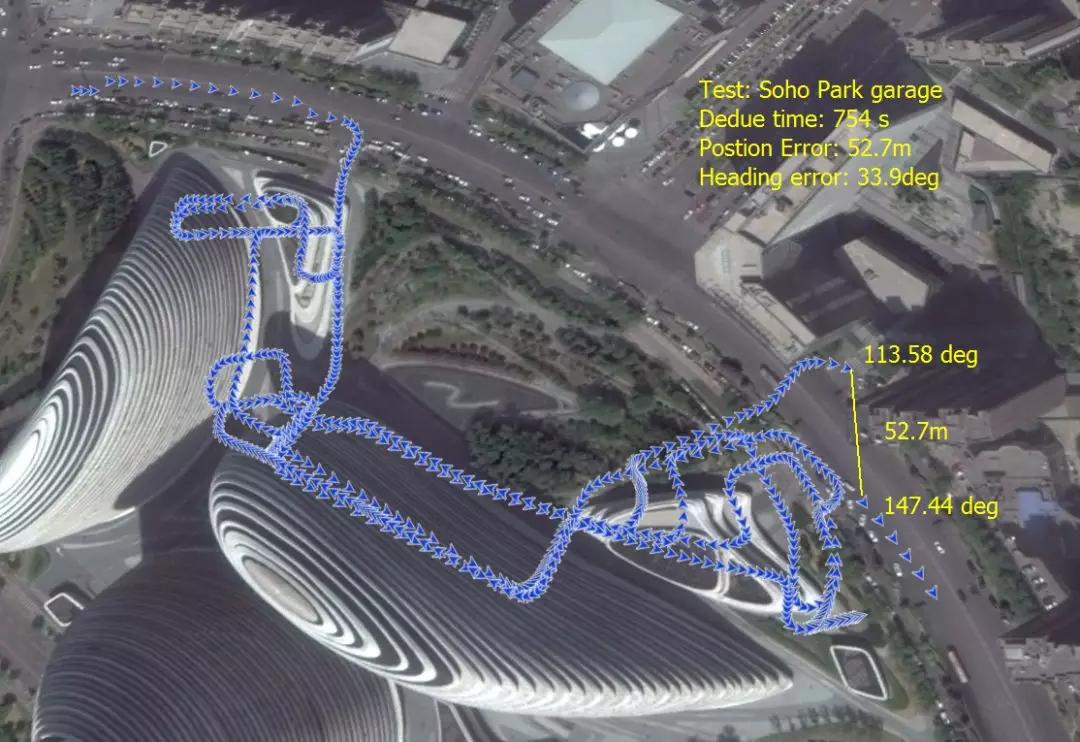
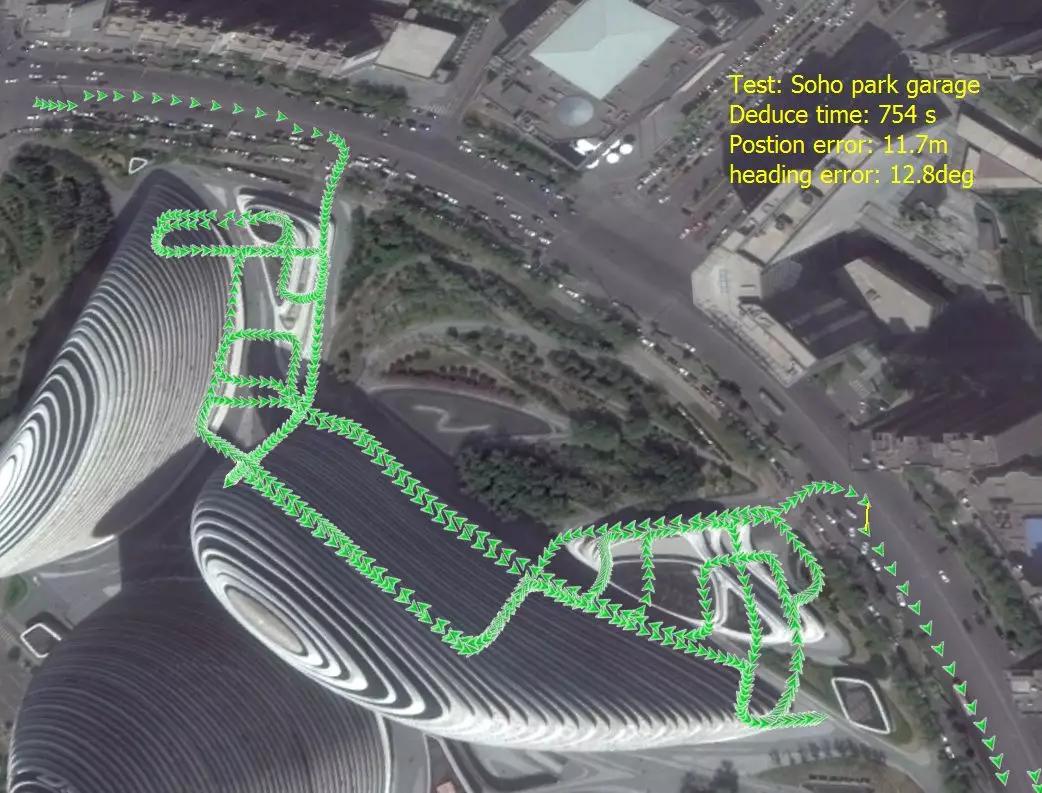
为验证有无陀螺仪动态零偏推断对DR对象和地位解算精度的影响,本项目收集眺望京soho泊车场的数据,经解算,后果如下。测试表白,经动态零偏积蓄后,DR精度显然进步:-零偏:动态零偏推断保障陀螺仪偏差量级为0.01度/s;-对象:泊车场出口出的对象偏差减小至40%以内,对象精度晋升2倍以上;
为估计主辅道识其它获胜率,统计了近千条主辅道的识别后果,识别率抵达90%以上,大于某厂商产物的75%。6.4横/纵向比拟
终末,咱们与市情的中高端竞品实行了横向比拟,与高德手机端定位产物实行了纵向比拟。横向比拟结果表白,正在器件本钱不到竞品本钱10%的情形下,不横跨某一阈值的地位偏差、对象偏差和速率偏差的占比均正在90%以上,相对竞品,进步了1%~5%。主辅助道识别切实率优于90%,相对付竞品进步了15%。纵向比拟结果表白,正在分歧场景(高架,都会峡谷,环岛,泊车场出口等)下,不横跨某一阈值的地位偏差占比晋升15%~60%不等,这是由于车机算法对独特场景(无GPS或弱GPS场景)实行了特意的算法策画和优化。全场景下的地位偏差占比晋升约20%。
针对用户提出的三大痛点题目,本文贯串众传感器调和和舆图成家,提出了一套车载众传感器调和定位计划,并使用于实质,进步了正在都会峡谷中的定位精度,而且获得了不错的后果。然而,都会峡谷的定位精度题目很难彻底办理,它好像是一个没有尽头的困难。为此,站正在用户的角度,咱们必要不绝思量:必要什么样的传感器技能、应当策画什么样的算法、奈何发现数据的最大价钱。
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏