激光雷达工夫是3D点云的代名词,为了弥漫运用3D点云数据,咱们有需要思索Lidar工夫的最新趋向以及怎样使数据让用户受益,本文研商了最新的开展。
近期,机载激光雷达的最大用意是正在3D点云的处分和成就交付中。无人机的轻量级传感器以及无人机的自立性也获得了开展。正在基于云的处分和存储主动化方面也博得了较大开展,从而大大缩短了成就交付时光。
悉数墟市上,lidar修造的最大点频已安定下来,跟着客户对lidar相干学问的提升,人们正正在思索获取尽大概众的数据细节,以求更有价格的供职。

修造趋同的时间,机载激光雷达的最大改观是数据处分方面。现正在,行使齐备基于云的编制机闭,还囊括正在云中的手动编辑和实行质料包管(QA),能够杀青更高的主动化和更高的结果。这种基于云的设施大大缩短了周转时光,并提升了功课现场和办公室之间的通用性。飞机着陆正在停机坪上后,能够即刻上传项目数据,乃至后处分的数据也能够正在云中交付。与全豹基于云的治理计划相同,大大都项目目下面对的寻事是带宽,由于须要足够的收集速率来杀青。
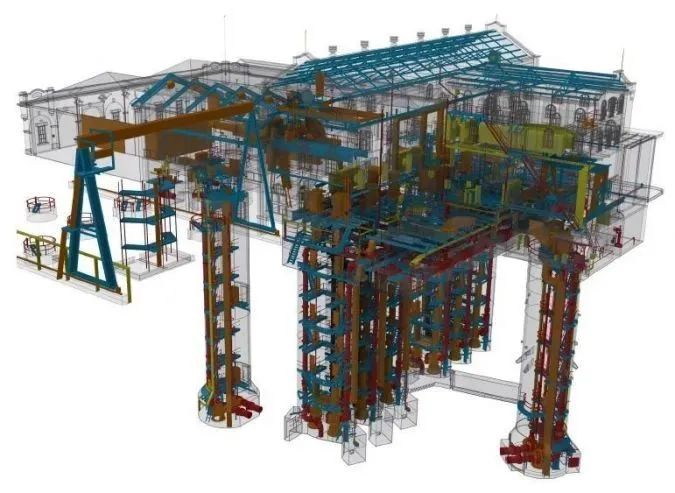
机载激光雷达是接济创修高质料数字高程模子(DEM)的基本,用以接济数字孪生并导出高质料的、最新的修筑模子。
潜心于都会区域和数字孪生,这意味着对全波形激光雷达的需求省略。大方的数据以及持续开展的数据料理需求加快了向基于云的存储和散播输以及日益高效的数据压缩款式的过渡。正在云中处分和存储大方数据的本钱大概会加起来,而且正在仅获取所需实质方面变得越来越智能。
近年来,客户与供应商之间的通讯有了更强的激动力。客户哀求供应相闭数据处分计划的更众音讯,囊括其质料包管和编辑设施。
正在过去的几年中,Mobile Lidar博得了长足的发展。转移激光雷达缉捕不再须要专家经心拼装的大方电缆和配件。现正在,全豹测绘级传感器(比如Velodyne和Ouster的传感器以及RIEGL、Trimble和Leica的丈量级平台)都更容易领导,即插即用。从宽的笔直视场或更长的丈量范畴到众脉冲或更高的精度,每种传感器都有其自己的上风。

正在双头体系中同时行使两个扫描仪的好处是,能够从较少的道道通行或铁道走廊内缉捕更众细节。这也意味着省略了数据遮挡,而且因为获取了众个角度的扫描数据而提升了地物了解度。
转移激光雷达爆发的点密度不绝正在寻事IT基本架构。比如,假使利用点云和图像压缩,一个小时的数据缉捕也能够天生大约200GB的原始数据。一个规范的项目能够由8个12MP摄像机正在一小时内爆发100GB的空间,这些摄像机以3m的间隔纪录图像,两个Lidar传感器以每秒一百万个点的速率同时运转。天生的远大数据成为传输速率和GPU之间的遏制。
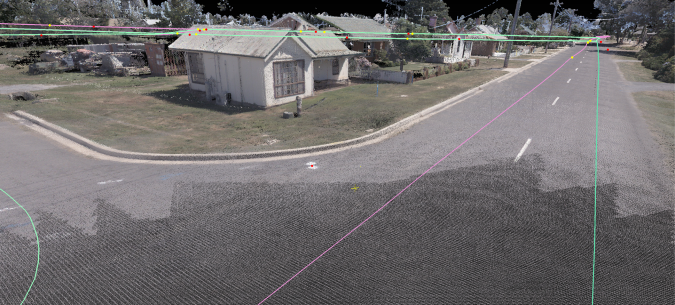
转移激光雷达的最新开展之一是将准确校准的高分辩率图像集成到点云。最新的体系具有一系列摄像机,这些摄像机连系了球形摄像机和定向摄像机。这种高度周到且校准的图像可杀青高质料的RGB彩色点云,从而改正了可视化和判辨才略。
近年来,运用卡尔曼滤波和基于图像的云到云配准工夫的改正,改正了轨迹处分,简化了转移激光雷达点云的处分。这意味着一经省略了很众手动点云瞄准和对地面限制的配准,从而加疾了总体处分速率。数据处分方面的改正意味着客户可能更疾地着手处分无误的数据。
呆板进修特性提取正在从机载和转移激光雷达数据中提取价格方面施展着紧张用意。正在呆板进修强盛开展的同时,照旧须要更众规范的锻炼数据集,以适合每种利用,呆板和数据科学家能够行使这些锻炼数据集来优化算法。标识点云内对象的带标签的锻炼数据集变得越来越有价格。
大约15年前,正在全豹硬件和软件平常使命的情形下,行使Leica HDS3000能够杀青每天三次扫描。扫描仪的重量为16公斤,电池的巨细相当于公函包的巨细,能够通过札记本电脑实行限制。
正在地面激光雷达中,硬件获得了突飞大进的开展,最新一代的扫描仪每天能够完毕200众次扫描。现正在,测绘人面对的寻事一经形成怎样更有用地处分所罕睹据。
现正在的修造一天之内能够完毕的扫描次数越来越众,固然主动点云对齐算法正在几年前就有治理计划。可是,运转该流程须要大方时光,而且须要苛刻的质料反省以确保原始数据确切无误。实际情形是正在通过玻璃、漫长的无特性的走廊以及有大型转移物体的数据,都大概导致数据结婚腐朽。
正在“主动化”成为改日代名词的行业中,但令人惊异的是,地面点云处分的最新开展尚未杀青主动化。假设软件现正在具有正在搜集数据时正在野外瞄准处分点云的才略,就制服了手动配准处分的坏处,能够让操作员正在停止之前目视反省瞄准。
纵然基于平板电脑的对齐体例会占用扫描搜集时光,但点云和HDR成像时光的改正很容易抵消了这种延迟。
◆ 操作员能够正在平板修造上及时向客户显示对齐的数据,从而使他们越发玩赏和参加正正在实行的使命。
即时数据处分仍须要有巨大的考核限制和苛刻的数据质料包管流程。数据完好性永远须要古代测绘工夫的接济。
激光雷达的第四个也是终末一个常用的贸易平台是行使即时定位和舆图绘制(SLAM)工夫的手持式/背包式短隔断激光雷达。SLAM使激光雷达体系可能将自己定位正在其境遇中-时时是无GNSS的空间。跟着SLAM算法的改正,手持式激光雷达已成为一种常睹的贸易治理计划。
正在商用手持修造之前,地面激光雷达是室内激光雷达的独一通用治理计划。这些治理计划的上风正在于它们的速率,众效力性和易用性。正在利用步调能够容忍较低精度的地方,它们正在数据搜集、处分和交付时光的速率方面取得了光鲜的上风。
将SLAM工夫与自立性较强的无人机相连系,可为采矿和丰富的封锁场合供应巨大的室内制图治理计划。行使无人机避障效力,使无人机可能超视距航行,而且激光雷达数据会及时回传给操作员。
近年来,行业不绝尽头闭心怎样提升向用户交付激光雷达数据的速率。还正在思索诸如从现场将数据上传到云,扫描数据主动对齐处分,产物主动化以及通过收集实行数据交付等设施,最终让用户能够更疾地汲取数据。
跟着数字孪生工夫的开展,现正在人们对运用一系列集成的激光雷达工夫齐备掩盖修筑物和资产的兴味日益深厚。近期的开展也提升了Lidar正在很众平台上的众效力性,让咱们比以往任何时间都更容易供应基于Lidar的完好点云治理计划。
汽车测试网-树立于2008年,报道汽车测试工夫与产物、趋向、动态等 闭系邮箱 marketing#auto-testing.net (把#改成@)
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏