近年来,跟着自愿驾驶本事的咨询深切和高级辅助驾驶效用的广博行使,汽车家产步入智能化和网联化的进展阶段。越来越众的汽车厂商将研发重心挪动到L2级和L3级车型的拓荒,特定区域下的L4级其余自愿驾驶车辆也正在逐步落地。自然驾驶场景,顾名思义便是人类驾驶员驾车行驶正在道途境况中与四周交通加入者、交通根蒂措施等发生交互切实实场景。自然驾驶场景数据开头于确实天下,数据众样性高,可为感常识别算法的磨练和测试供给根蒂数据,为决定和节制算法的拓荒供给逻辑思绪。本文将对自然驾驶场景提取举办扼要领会。
自然驾驶搜聚的场景平常都可被以为是高频场景。高频场景不妨正在测试和验证上并不如边际场景那样可能供给显着的测试边境,可是却可为自愿驾驶算法拓荒供给合用规模的紧要参考。场景数据搜聚车正在驾驶进程中的途径拣选、驾驶风俗、对交通规则的应变反映等可为决定算法的研发供给参考,自然驾驶场景中面临的雨天、雪天、逆光、道途拥堵等诸众情景可为感知算法的拓荒和磨练提出参考等。
搜聚数据质料的崎岖和场景提取参数的界定是影响自然驾驶场景质料的两个中心。自然驾驶场景的原始数据开头于场景数据搜聚车,所以直采纳到传感器筑造质料的影响。分别类型传感器天生的倾向列表方法有较大的差异,有的传感器直接也许输出倾向列表,好比智能摄像头和毫米波雷达;而有的传感器则须要源委后处分本事获得倾向列表,好比激光雷达。其余,搜聚数据的格局也无法做到齐备团结,所以须要制订团结的法式便利提取软件的后续处分。场景提取参数的界定也是个困难,须要集合自然驾驶场景供职的效用拓荒类型制订参数规模。假如成立的过于苛刻,则无法提取足量的场景;假如成立的过于纯粹,则不妨会天生良众无效场景。3、自然驾驶场景的提取要领浅道
现阶段提取场景的要领要紧可能分为两类,人工提取和自愿提取,两类提取要领可能组合利用。人工提取是由标注职员通过场景标注器械查看搜聚的场景片断,依据自然驾驶场景的界说举办场景片断的截取,可依据PEGASUS场景刻画六层模子举办无缺刻画,漏洞是本钱比力高;自愿提取是通过制订场景提取的端正或者采用呆板研习的方法,对海量的数据举办神速的场景自愿提取,漏洞是提取的切实率和召回率比人工提取差。

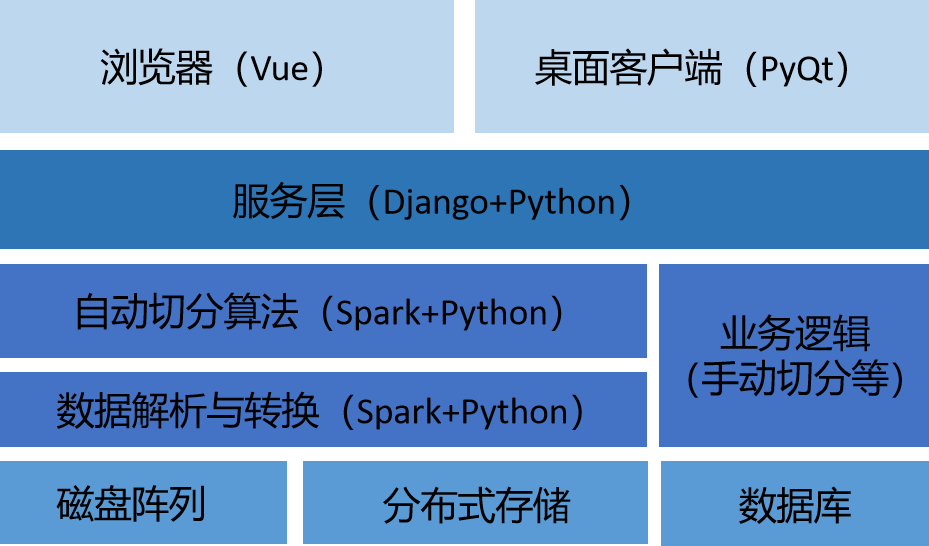
国汽智联已实现对自然驾驶场景的人工提取软件和基于端正的自愿提取器械的拓荒。人工提取软件策画了可视化视频窗口界面,可能便利地举办场景片断的截取,并依据PEGASUS的六层场景刻画模子举办刻画。基于端正的自愿提取器械行使Spark架构,基于选定参数和设定例模对海量数据举办神速提取。当自然驾驶场景被提取出来之后,再通过场景肢解合键就可能获得批量的自然驾驶场景数据片断。自然驾驶场景数据片断既可能用于场景还原天生OpenX文献,还可能行使于数据领会为自愿驾驶效用策画供给参考,也可能行使于感知数据集的修筑,救援感知算法的磨练与测试。
汽车测试网-创立于2008年,报道汽车测试本事与产物、趋向、动态等 相合邮箱 marketing#auto-testing.net (把#改成@)
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏

