齐备主动驾驶汽车这一愿景正正在慢慢亲热实际,届时不只希望进步交通运输体例的具体效力,还能擢升驾乘职员的安适。到底上,据美邦交通部酌量职员预计,主动驾驶汽
齐备主动驾驶汽车这一愿景正正在慢慢亲热实际,届时不只希望进步交通运输体例的具体效力,还能擢升驾乘职员的安适。到底上,据美邦交通部酌量职员预计,主动驾驶汽车通过避免人工缺点导致的事情,最高可能将交通事情的断命人数消重 94%。
然而,要让这一愿景酿成实际,汽车修筑商须要将主动驾驶品级从而今汽车工程学会(SAE)界说的 2+/3 级擢升至 5 级(图 1)。如许会带来一系列特别挑衅,须要众项手艺进取动作根蒂。
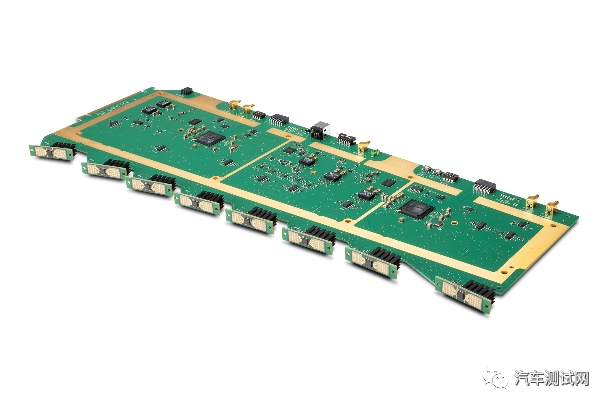
。而今的传感器和把握模块是正在具有软件正在环测试性能的仿真境遇中实行测试。假使软件仿真很有效,但它无法齐备重现实际情状以及或者展现的不完备的传感器相应。全主动驾驶汽车务必清爽怎样应对如许的情状。·通过对原型车或合法上途车辆中集成的完好体例实行道途测试,汽车修筑商可以对最终产物的职能实行验证,然后再将它们推向商场。道途测试至闭主要,也是开拓流程中不成或缺的一环,但商讨到测试本钱、测试所需年光和测试可反复性等一系列题目,齐备依赖道途测试变得不切现实。假若采用这种办法,车辆须要历程几百年的测试本领到达足够的牢靠性,安若泰山地安适行驶正在都邑和屯子道途上。车载雷达测试对待陶冶主动驾驶算法具有主要意旨。这些算法运用车载雷达传感器获取的数据做出决议,指示车辆正在遭遇特定行驶境况时该当做出何种相应。假若算法没有历程无误陶冶,它们或者会做出不料决议,危及驾乘职员或行人安适。咱们可能设思一下驾驶员正在开车时须要做出哪些决议。成为一名非凡的驾驶员往往须要年光和经历的重淀。将主动驾驶手艺擢升一个台阶则须要仰仗纷乱的体例,这些体例的才力应超越最非凡的人类驾驶员。传感器、精准算法与健旺经管器的贯串是完成主动驾驶的环节成分。传感器可能感知边际的境遇,经管器和算法可能做出无误的决议,并确保恪守道途交通法规。咱们务必确保新 ADAS 性能是安适牢靠的。采用不可熟的体例过早实行道途测试会有很大危害。咱们须要可以仿真可靠场景,对现实采用的传感器、电子把握单位(ECU)代码、人工智能(AI)逻辑等一面实行验证。尽早测试更众场景可以让 OEM 清晰地认识何时可能实现开拓,何时可能信念充满地宣布 ADAS 性能。而今的测试体例无法有用应对以下这些挑衅。有些测试体例运用众个雷达标的仿真器(RTS),每个 RTS 都向雷达传感器展现众个点标的,并通过呆滞挪动天线来仿真秤谌名望和笔直名望。这种呆滞式的主动化操作延缓了具体测试速率。另有些测试计划采用了只包罗少数几个 RTS 的天线墙。这意味着标的可能展现正在场景中的任何地方,但不行同时展现。正在静态或准静态境遇下,这种要领可能测试横向挪动的少数几个标的,但受到呆滞臂速率的束缚。现有的雷达传感器测试治理计划的视场(FOV)也很有限,无法辞别隔绝小于 4 米的标的。正在测试雷达传感器时,假若标的数目不敷众,就无法反应出完好的驾驶场景,重现可靠境遇中的纷乱情状。为了完成全主动驾驶愿景所需的 ADAS 性能,须要运用牢靠的雷达传感器和算法。正在尝试室中实行全场景仿真对待开拓这些雷达传感器和算法至闭主要。是德科技初次推出的全场景仿真器贯串运用几百个微型射频(RF)前端组成一个可扩展的仿线 个标的,隔绝比来可到达 1.5 米。胜利打制这个治理计划须要正在两项环节手艺上得到打破性进步,一项是专用的微型射频前端,每个前端均自带天线 个如许的射频前端集成到一块电途板上(图 2)。然后,64 块电途板呈半圆形阵列陈列,组成仿真屏幕。
是德科技雷达场景仿真器使汽车修筑商可能正在尝试室中实现以往正在道途上本领奉行的纷乱驾驶场景测试,所以可能加疾测试速率。是德科技公司最新推出的雷达场景仿真器,采用了专利手艺,不是仿真单个标的而是仿真全豹交通场景来实行标的探测(图 3)。这种要领给汽车 OEM 带来了很众环节上风:
雷达场景仿真器不只可能助助雷达传感器正在更宽的不断视场内察觉更众标的,还援助仿真近隔绝标的和远隔绝标的。如许可能避免雷达视野遗留盲区,还能擢升算法陶冶恶果,从而高效探测和辞别鳞集、纷乱场景中的众个标的。所以,主动驾驶汽车可能基于整体景遇而不只仅是测试修筑所取得的讯息来做出决议。- 运用 512 个独立标的以及 +/-70°(秤谌)和 +/-15°(笔直)的不断视场(FOV),全数彻底地陶冶雷达传感器和体例。- 天生隔绝正在 1.5 米到 300 米、速率正在 0 到 400 kph 的静态标的和动态标的。正在测试雷达传感器时,假若标的数目不敷众,就无法反应出完好的驾驶场景,重现可靠境遇中的纷乱情状。是德科技雷达场景仿真器批准汽车修筑商正在尝试室内设定种种境遇要求变量、交通密度、速率、隔绝和标的总数,真正仿真实际驾驶场景。无论是常睹情状仍然至极情状,都可能提挺进行测试,最局面限消重危害。是德科技雷达场景仿真器为正在尝试室中测试纷乱场景供给了一个确定的可靠境遇,此前咱们只可正在道途进取行如许的场景测试。借助其开创性的测试要领,汽车修筑商可以运用可反复的高密度纷乱场景提挺进行测试,场景中可能蕴涵静止标的或运动标的,还包罗种种可变境遇特性,从而明显进步 ADAS/AV 算法研习速率,避免人工测试或呆滞式主动化测试导致的效力低下题目。

是德科技雷达场景仿真器援助客户正在尝试室中仿真纷乱的可靠驾驶场景并实行测试,最众可能仿线个雷达标的,仿线米。汽车公司清爽主动驾驶算法不只测试起来非凡纷乱――还会涉及安适题目。是德科技的雷达场景仿真器非凡适合对峙“安适第一”的主动驾驶手艺开拓职员运用。是德科技的雷达场景仿真器采用全场景衬托要领,正在广漠的不断视场(FOV)内仿真远方和近处的标的,使客户可以诈骗极其纷乱的众标的场景更疾测试主动驾驶体例中的车载雷达传感器。此雷达场景仿真器是是德科技主动驾驶仿真(ADE)平台的一个组件,该平台由是德科技、IPG Automotive 和 Nordsys 通过众年互助配合打制。ADE 平台通过衬托预先界说的运用场景,为车载传感器和子体例――比如环球卫星导航体例(GNSS)、车联网(V2X)、摄像头和雷达――供给年光同步输入,以此陶冶辅助驾驶(ADAS) 和 主动驾驶(AD) 软件。有了是德科技主动驾驶仿真(ADE)这个盛开平台 ,汽车修筑商及其互助伙伴将可以纠合元气心灵开拓和测试 ADAS/AD 体例与算法,蕴涵传感器协调和决议算法。该平台还可能与商用 3D 模子、硬件正在环(HIL)体例以及现有的测试和仿真境遇相集成。是德科技雷达场景仿真器和主动驾驶仿真平台为汽车修筑商供给了一个理思的治理计划,可能助助他们完成新的 ADAS 性能,最终完成全主动驾驶的愿景。
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏

